本文提出了 CounterScene 框架,这是一种引入结构化反事实因果推理的生成式 BEV 世界模型。该方法通过在扩散生成过程中对关键交通代理进行最小干预,成功在 nuScenes 和 nuPlan 数据集上实现了高逼真度且具有挑战性的闭环安全评估场景生成。
TL;DR
如何在仿真中生成既“真实”又“致命”的危险场景,一直是自动驾驶评估的圣杯。传统的对抗仿真往往因“大力出奇迹”的轨迹扰动导致场景失真。CounterScene 另辟蹊径,首次将结构化反事实因果推理(Counterfactual Causal Reasoning)植入基于扩散生成的 BEV 世界模型。它不强行制造碰撞,而是通过询问“如果那个让行的车没停会怎样?”,精准剥离安全裕度,让风险随天然生成的交互链条“演变”出来。
1. 痛点:真实性与对抗强度的“死亡天平”
现有的安全评估场景生成方法(如 CTG, STRIVE)普遍面临一个尴尬境地:
- 保守派:生成的轨迹非常平滑真实,但由于模型倾向于模仿人类的安全驾驶习惯,碰撞率极低,无法起到压力测试的作用。
- 激进派:通过优化手段强行把车“推”向碰撞点,结果车辆往往出现瞬移、侧滑或无视道路几何的离谱轨迹(Realism 崩溃)。
本质原因在于:现有模型大多捕捉的是统计相关性,而不是交互的因果结构。它们不明白场景之所以安全,是因为某一个关键代理(Causally Critical Agent)在特定时空点做出了“退让”。
2. 核心直觉:寻找维持安全的那个“变元”
CounterScene 的核心理念非常迷人:在一个原本安全的场景中,安全并非偶然。它通过以下逻辑重构场景:
- 识别“谁”最关键:通过几何冲突分析(Intersection vs Following),找到那个一旦行为改变就会导致安全链条断裂的代理。
- 显式建模“如何”干扰:构建因果交互图(CIG),确保对一个人的修改能通过世界模型自然地传播给其他人。
- 精准实施“What-if”:在扩散模型去噪过程中,动态地压缩时空裕度(Spatial-Temporal Margin)。
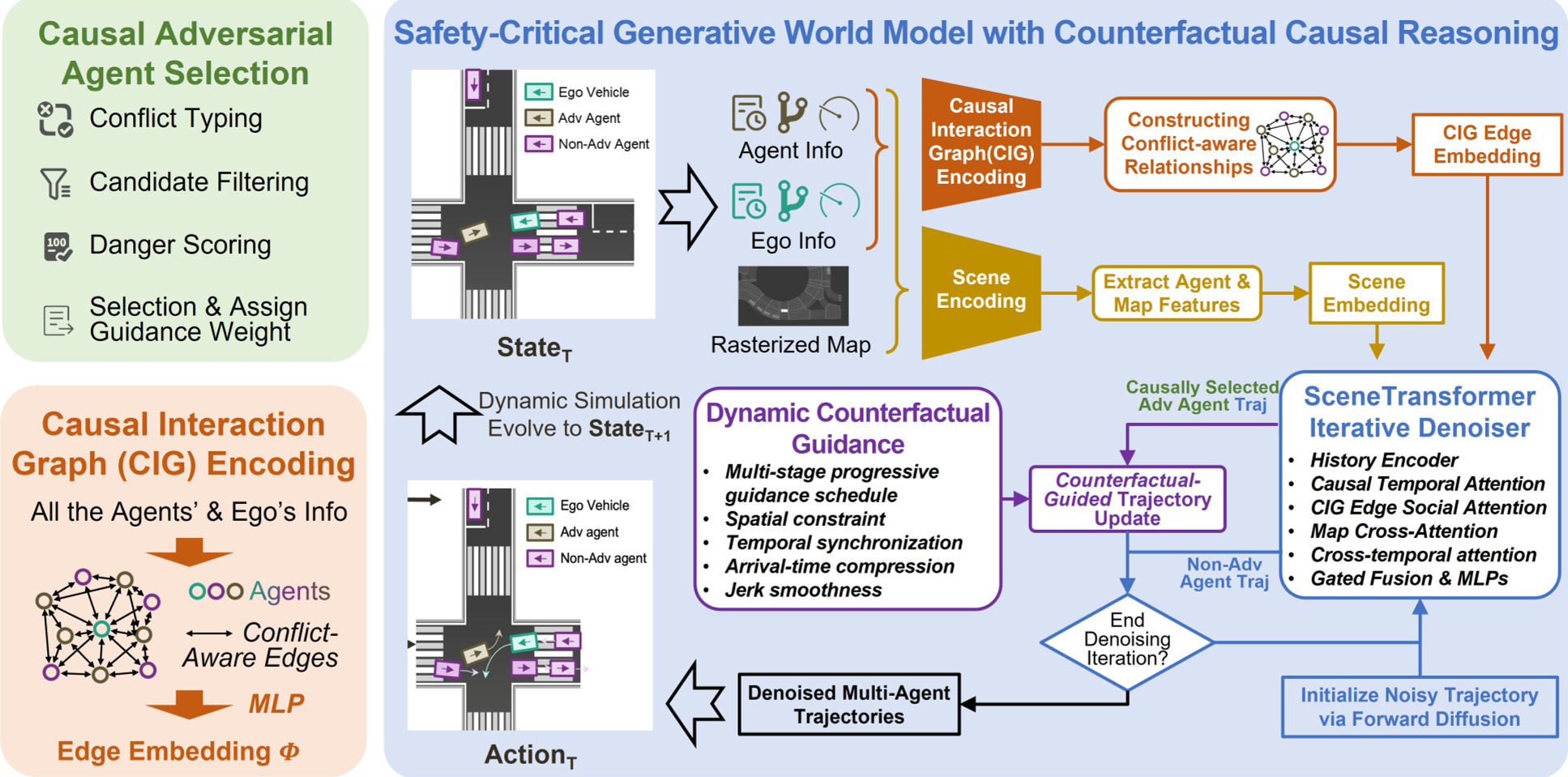 图 1:CounterScene 框架:从因果识别到冲突感知建模,再到反事实引导生成。
图 1:CounterScene 框架:从因果识别到冲突感知建模,再到反事实引导生成。
3. 技术详解:剥离安全裕度的艺术
3.1 冲突感知交互图 (CIG)
CounterScene 不仅仅是把位置输入 Transformer,它通过一个显式的图结构建模代理间的依赖。 $$e_{ij}^t = [ \Delta p, \Delta v, ext{TTC}, ext{TTI}, \dots ]$$ 这些特征被编码进注意力机制,确保当模型修改“挑衅者”的轨迹时,“受害者”能基于物理和语义约束做出真实的反应。
3.2 阶梯式自适应引导
这是保持真实性的杀手锏。作者将 100 步的扩散去噪分为三个阶段:
- 前期 (p < 0.3):极弱引导,让模型先形成大致的轨迹雏形。
- 中期 (0.3 - 0.7):线性增强引导,开始拉近与 ego 的距离。
- 后期 (p > 0.7):最强引导,精准锁定碰撞点。
这种“先形似,再神似”的策略,配合 加加速度正则化 (Jerk Regularization),确保了即使在碰撞瞬间,车辆的运动特征也完全符合物理常识。
4. 实验战绩:全方位的跨越
在 nuScenes 数据集上,CounterScene 展现了降维打击般的优势:
- 对抗效能:在 8-10 秒的长程模拟中,碰撞率(CR)达到 22.7%,远超 CCDiff 的 12.3%。
- 逼真度:平均位移误差(ADE)下降了 24.2%,证明干预极其轻微,生成的场景极其像人。
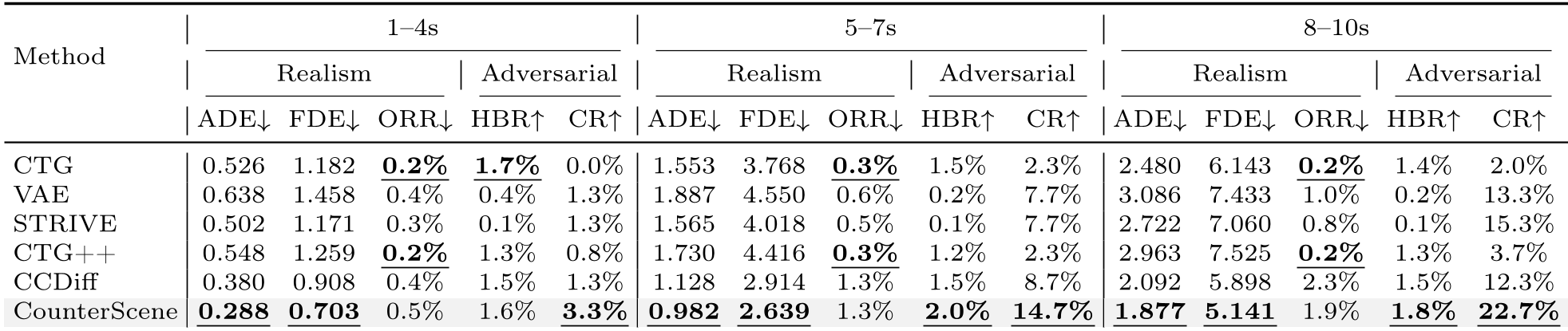 表 1:在不同预测窗口下,CounterScene 在真实性与对抗指标上均保持 SOTA。
表 1:在不同预测窗口下,CounterScene 在真实性与对抗指标上均保持 SOTA。
跨数据集的零样本(Zero-shot)神迹
最令人惊叹的是,该模型在 nuScenes 上训练,直接在 nuPlan(包含波士顿、拉斯维加斯等完全不同驾驶文化的城市)上测试,性能依然稳健。 深度洞察:这证明了 CounterScene 捕捉的是冲突的物理本质(即两个物体不能在同一时间占据同一空间),这种物理因果规律是跨数据集不变的(Causal Invariance)。
5. 总结与反思
CounterScene 告诉我们,世界模型不应该只是一个黑盒生成器,它需要长出“逻辑大脑”。通过将自动驾驶安全验证分解为“识别关键变量”和“执行反事实干预”,我们不仅得到了更高质量的仿真数据,还获得了一种解释风险如何产生的手段。
局限性:目前干预主要集中在单代理上,未来的挑战在于如何建模多代理协同“作恶”的更复杂场景。但无论如何,CounterScene 已经为通往物理人工智能(Physical AI)时代的防御性测试铺平了道路。