本文提出了 DexDrummer,一个能够实现双手、高频接触且长程稳定的机器人架子鼓演奏框架。该系统通过分层强化学习(Hierarchical RL)和物体中心(Object-centric)的策略,实现了在仿真环境及真实世界中对鼓棒的精细手内操控(In-hand Manipulation)与节奏对齐。
TL;DR
演奏架子鼓对机器人而言是一项“终极挑战”:它要求在高速移动中保持手内鼓棒的稳定(手内操作)、处理鼓棒与鼓面频繁的物理撞击(高频接触),并维持长达数十秒甚至数分钟的节奏感(长程任务)。斯坦福大学的研究团队推出的 DexDrummer,通过一种层级式物体中心化策略,成功让配备 20 自由度灵巧手的机器人实现了仿人化的击鼓表现。
核心速览
传统的灵巧手研究往往局限于“转魔方”或“拿起杯子”这种孤立任务。DexDrummer 的核心价值在于它证明了:通过残差 RL (Residual RL) 修正全局规划,并配合手指主导的接触奖励机制,机器人可以处理极高复杂度的动态交互任务。
1. 为什么击鼓这么难?(挑战与动机)
作者指出,目前的灵巧操作主要受限于三个维度的脱节:
- 手内控制 (In-Hand Control):击鼓时鼓棒会滑动,机器人必须实时调整手指位置。
- 接触丰富度 (Contact-Rich):每一次击打鼓面都是一次剧烈的外部扰动,会打破原本的动力学平衡。
- 长程鲁棒性 (Long-Horizon):随着演奏时间增加,误差会不断累积,导致逻辑链条断裂。
以往的方法要么固定死抓握点(无法应对滑动),要么使用纯 RL(难以学习长距离的跨鼓移动)。
2. DexDrummer 的架构:分层治理
为了平衡“全局移动”与“局部灵巧”,DexDrummer 采用了双层分层架构。
A. 高层策略:残差的力量
系统首先生成鼓棒在空间中的参考轨迹,通过运动规划(Motion Planning)计算手臂的大致动作。然而,高速运动下机械臂会有跟踪误差。这时,残差 RL (Residual RL) 介入,在标称轨迹之上学习一个小幅度的修正量,极大地缩小了动作空间,提高了学习效率。
B. 低层策略:精细的手指控制
真正的“灵巧”发生在指尖。为了让机器人像人类鼓手一样用手指(而不是死板的手臂)去“弹”鼓,作者设计了独特的奖励函数:
- 支点奖励 (Fulcrum Reward):强制拇指和食指稳住鼓棒中心。
- 手臂能量惩罚 (Arm Penalty):如果机械臂动得太多,奖励会变少,这逼迫模型学会用更节能、更快速的手指拨动来完成击球。
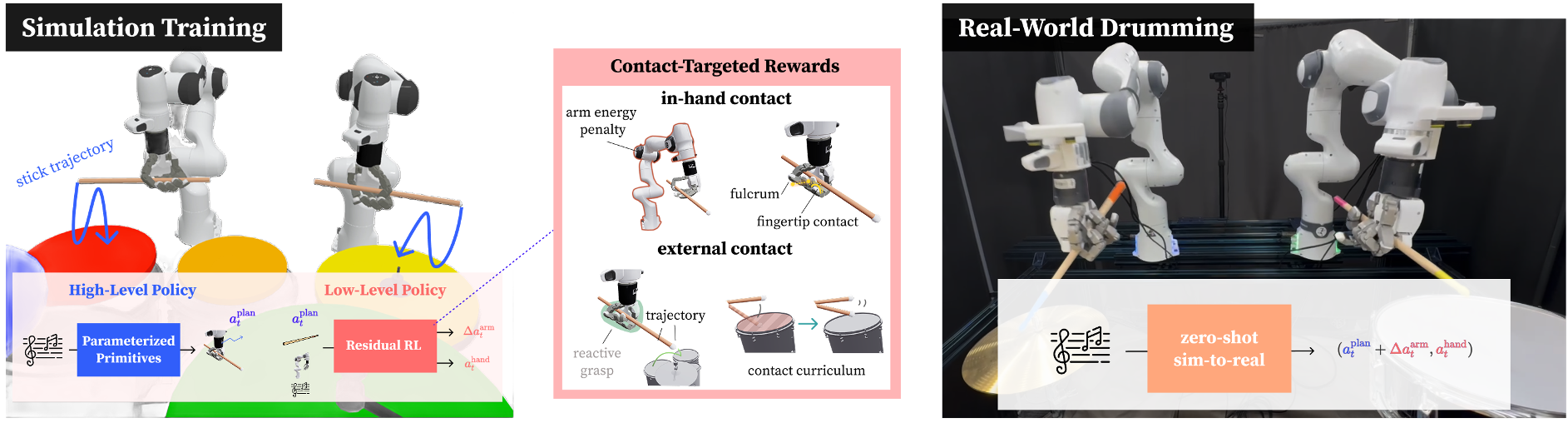 图 1:DexDrummer 框架概览,展示了从高层轨迹规划到低层接触奖励的全过程。
图 1:DexDrummer 框架概览,展示了从高层轨迹规划到低层接触奖励的全过程。
3. 教学黑科技:接触课程学习 (Contact Curriculum)
在训练初期,鼓面的存在反而会阻碍手指学习如何旋转鼓棒(因为鼓棒总会被鼓面挡住)。 作者引入了一个极其简单但有效的 Trick:接触课程学习。在训练的前 10,000 步,鼓棒和鼓面之间的碰撞检测是关闭的。机器人可以先在“真空”中学会完美地跟踪点击轨迹,等到掌握了基本的挥动技巧,再引入力学反馈进行微调。
4. 实验战绩与 SOTA 对比
在 ManiSkill 仿真环境和真实 Franka + Tesollo 机器人平台上的测试显示:
- 反应式抓握的必要性:相比于冷冻手指关节的“固定抓握(Fixed Grasp)”,DexDrummer 的“反应式抓握(Reactive Grasp)”在处理长程任务时的鼓棒保持率和 F1 成绩大幅领先。
- 手指驱动 vs 手臂驱动:实验证明,在高频率(BPM 180+)下,手臂驱动的方案完全失效,而手指驱动方案依然能保持极佳的轨迹跟踪精度,且功耗降低了 70% 以上。
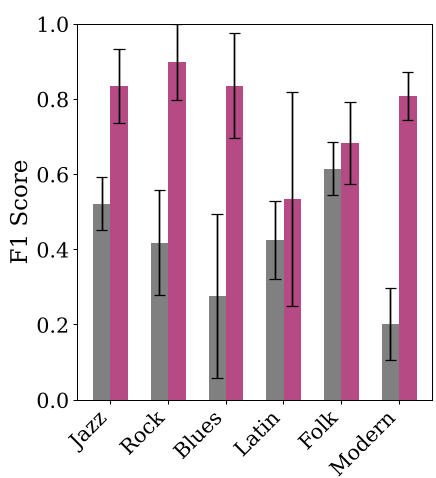 图 2:反应式抓握在复杂长程任务中的稳定性远超固定抓握。
图 2:反应式抓握在复杂长程任务中的稳定性远超固定抓握。
5. 深度洞察:拟人化行为的涌现
最令人惊讶的是,在 240 BPM 的高速练习曲线中,机器人自发学会了人类鼓手的技巧:在下击时利用后三指挤压鼓棒产生爆发力。 这种行为并非人工预设,而是为了优化能量惩罚下的打击力度而自然“演化”出来的。
 图 3:真实世界部署:机器人表现出在撞击硬质鼓垫时收紧抓握,在撞击镲片时放松抓握的自适应能力。
图 3:真实世界部署:机器人表现出在撞击硬质鼓垫时收紧抓握,在撞击镲片时放松抓握的自适应能力。
6. 总结与展望
DexDrummer 不仅仅是一个会打鼓的机器人,它构建了一套处理高动态、强交互任务的范式。
- 局限性:目前仅能处理慢速或降速后的乐曲,距离真正的人类极限(如 300 BPM 以上的死亡金属鼓点)还有差距。
- 未来启示:这种将“能量约束”作为归纳偏置(Inductive Bias)来激发手指灵巧性的思路,对于所有需要精细操作的工业场景(如柔性装配、厨艺机器人)都极具参考价值。