本文提出了 Fast SAM 3D Body,这是一个针对单目 3D 人体网格恢复(HMR)任务的无须训练加速框架。该方法在保持 SAM 3D Body (3DB) 顶尖精度的同时,通过重构推理路径实现了最高 10.9 倍的端到端提速,成功支持了基于单 RGB 流的机器人实时人形控制。
TL;DR
在 3D 人体网格恢复(Human Mesh Recovery, HMR)领域,SAM 3D Body (3DB) 凭借其卓越的泛化能力成为了 SOTA。然而,数秒级的延迟让其在机器人控制等实时场景中望而却步。本文介绍的 Fast SAM 3D Body 通过彻底重构 3DB 的推理路径,在**完全不改变模型权重(Training-free)**的情况下,实现了 10.9x 的加速。它将原本笨重的 HMR 转换为了一个高效的流水线,使得仅凭一台普通的 RGB 摄像头就能实时驱动人形机器人。
核心定位:从“准”到“快”的跨越
该工作的核心价值在于其系统级的视野。作者并非通过牺牲精度来换取速度,而是精准识别了 3DB 流程中不必要的串行等待和冗余计算。它不仅是一个算法的改进,更是一个工程与学术直觉完美结合的加速框架。
痛点深挖:为什么 3DB 慢?
作者分析指出,传统的 3DB 管道存在三个“性能杀手”:
- 串行阻塞:必须先等身体解码完成,才能确定手部位置,导致特征提取无法并行。
- 动态开销:Transformer 解码器的自精炼循环(Feedback Loop)导致计算图无法由硬件加速器(如 TensorRT)预优化。
- 拓扑转换瓶颈:MHR 格式虽好,但下游机器人控制多采用 SMPL 格式。传统的迭代拟合方法每帧需要数百次循环,是整个流程中最慢的一环。
方法论详解:三位一体的加速策略
1. 空间依赖的解耦 (Spatial Dependency Decoupling)
作者引入了一个极其轻量的 2D 姿态检测器(如 YOLO11-Pose)作为先验。通过粗略的关节点位置直接推导出肢体的 Bounding Box。
- 直觉:下游强大的解码器对位置有一定的鲁棒性,不需要 sub-pixel 级的检测,这就允许我们将手部和身体的特征提取合并为一个 Batch 在显卡上并行执行。
2. 静态图重构与解码器剪枝
通过将动态更新的 Token 映射为静态执行图,解锁了 CUDA Graph 和 TensorRT 的低级硬件优化。同时,作者发现 Transformer 的前几层主要是语义关联,不需要每层都做复杂的运动学投影。
- 改进点:通过
IntermPred修剪,只在特定的层进行关键点更新,极大减少了计算负载。
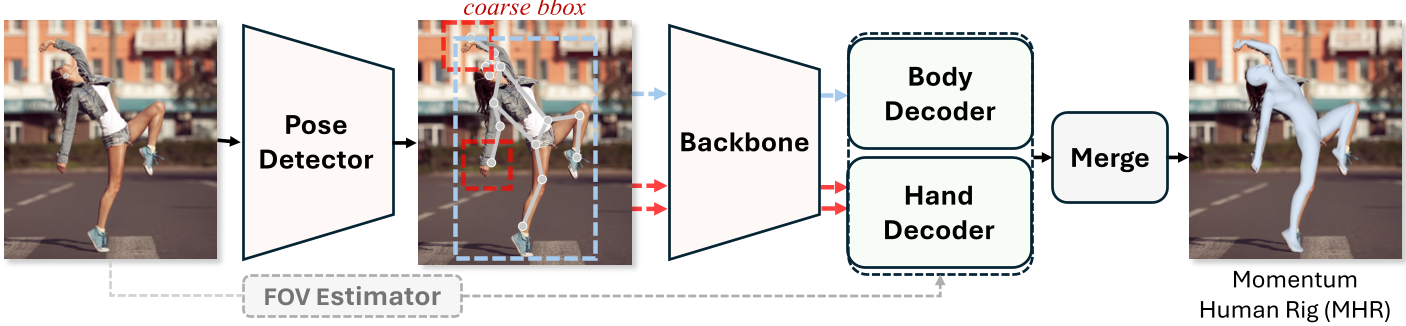 图 1: Fast SAM 3D Body 流程图。展示了通过解耦空间先验实现的并行特征提取架构。
图 1: Fast SAM 3D Body 流程图。展示了通过解耦空间先验实现的并行特征提取架构。
3. 神经运动学投影 (Neural Kinematic Projection)
这是本文最惊艳的部分。作者用一个 3 层的 MLP 取代了复杂的迭代优化公式。
- How it works:先利用重心坐标(Barycentric Coordinates)将 MHR 顶点映射到 SMPL 表面,再通过 MLP 预测 SMPL 的 6D 旋转参数。
- 效果:这个转变直接将延迟从“秒”级降到了“微秒”级,加速比达到 10,000x。
实验与结果:性能与精度的平衡
在 3DPW, EMDB 等主流数据集上,Fast SAM 3D Body 展示了极强的竞争力:
- 吞吐量:在自动模式下,帧率从不到 1 FPS 提升至近 10 FPS(RTX 6000 Ada)。
- 精度 preserved:与原版 3DB 相比,MPJPE 误差增加极小(<5mm),在部分数据集(如 LSPET)上甚至因为简化的解码器减少了过拟合,性能反而有所提升。
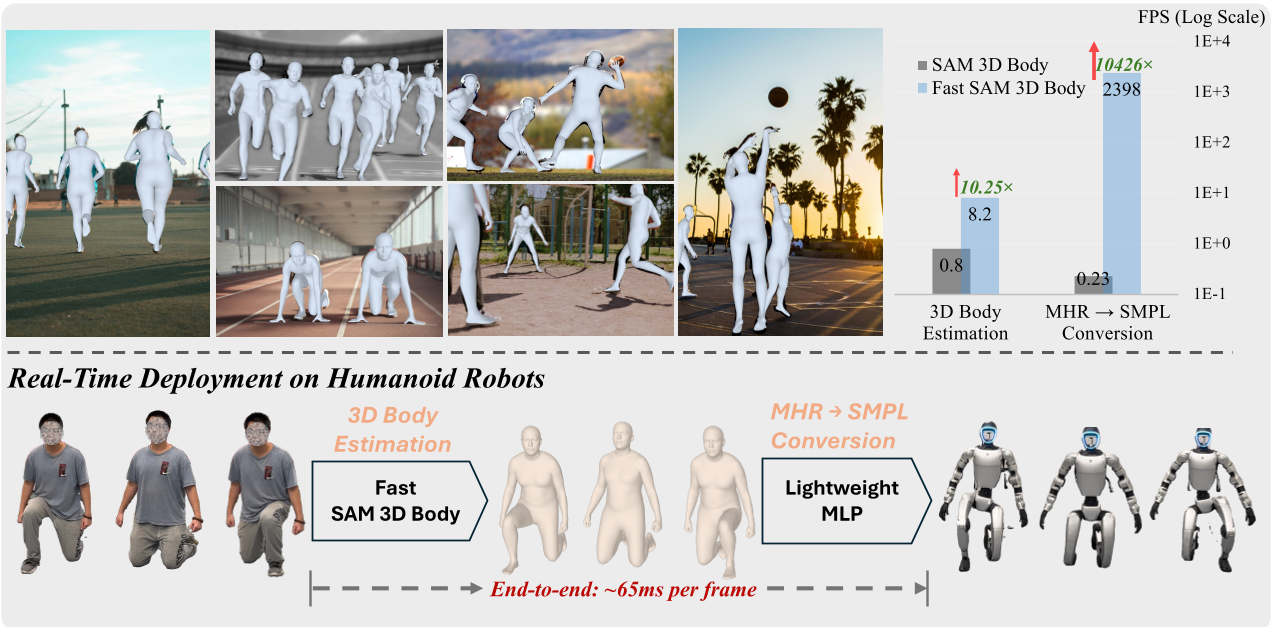 图 2: 性能与精度对比概览。右上方的图表清晰显示了 10,000x 的转换加速和 10x 的端到端提速。
图 2: 性能与精度对比概览。右上方的图表清晰显示了 10,000x 的转换加速和 10x 的端到端提速。
部署实战:人形机器人实时遥操作
为了证明其实用性,作者将其部署在了 Unitree G1 机器人上。通过单摄像头采集人体动作,经过 Fast 3DB 实时计算出 SMPL 参数,直接输入运动控制模型。实验展示了机器人能够流畅地模仿人类进行抓取、深蹲和侧步,验证了数据的运动学连贯性。
总结与洞察
Fast SAM 3D Body 的成功告诉我们:SOTA 模型并不一定意味着不可用的延迟。
- 局限性:虽然单视角表现优异,但在极端自遮挡情况下仍存在抖动(作者随后通过多视角融合进行了缓解)。
- 未来展望:这种“不改权重、只改流程”的加速思维,可以直接推广到其他基于大背骨(Large Backbone)的多阶段视觉任务中,如视频分割或实时 SLAM。
学术主编评语:该工作是学术成果向工业应用转化的范例,其对 MHR-to-SMPL 瓶颈的破除具有很强的通用参考价值。建议关注其开源的 MLP 转换权重,这可能是未来机器人视觉感知库中的核心组件。