本文提出了 FreeArtGS,一种针对自由移动场景(Free-moving Scenario)下的衔接物体(Articulated Objects)重建系统。该方法仅需单目 RGB-D 视频,通过结合运动感知的分块分割、鲁棒的关节估计以及端到端 3D Gaussian Splatting (3DGS) 优化,实现了高精度的几何、纹理及运动参数重建。
TL;DR
传统的衔接物体(如剪刀、抽屉)重建往往要求“基座不动”或“特定角度捕捉”。FreeArtGS 首次攻克了**自由移动场景(Free-moving Scenario)**下的重建难题。它仅需一段单目 RGB-D 视频,就能在物体位置和关节状态同时剧烈变化的情况下,精准还原物体的 3D 几何、高清纹理以及运动关节参数(轴线、位置、类型)。
背景:为什么“自由移动”这么难?
在 AR 或机器人领域,构建可交互的物体模型是核心需求。然而,现有技术(如 Video2Articulation 或 RSRD)大多基于一个脆弱的假设:物体必须有一个部分相对于相机是静止的。
想象一下你手里拿着一把剪刀边走边剪,剪刀的整体在动,刀刃也在动。在这种双重运动叠加下,传统方法会因为找不到参考坐标系而崩溃。此外,单视角拍摄往往覆盖不足,导致生成的资产缺失背面细节。
核心动机 (Motivation)
作者的直觉非常明确:如果能从复杂的相对运动中解耦出刚体分块,就能利用两块之间的相对变换来“反推”关节的物理约束。通过将这一过程与强力的 3D Gaussian Splatting (3DGS) 结合,可以在优化渲染质量的同时,强制模型符合物理关节定律。
核心方法论 (Methodology)
FreeArtGS 的架构分为三个精密衔接的模块:
1. 运动感知的分块分割 (Free-moving Part Segmentation)
算法不再寻找“静止点”,而是利用 AllTracker 提取 2D 轨迹并映射到 3D。通过优化一个基于 Huber Loss 的运动求解器,并结合 DINOv3 的语义特征作为空间平滑约束(Smoothness Loss),将物体自动划分为不同的刚体组件。
2. 抗噪关节估计 (Joint Estimation)
在得到分块后,系统计算两块之间的相对变换矩阵序列。
- 类型判断:通过旋转幅度(Rotation Amplitude)和位移线性度(Translation Linearity)来自动区分是旋转关节(Revolute)还是平移关节(Prismatic)。
- 轴线求解:利用 SVD 分解求解运动轨迹的零空间,从而确定旋转轴方向或平移向量。
3. 端到端 3DGS 优化
这是提升画质的关键。作者引入了**轴线感知(Axis-aware)**参数化,将 3D 高斯点云绑定在分块坐标系下。
- 混合渲染 (Blended Rendering):通过软权重混合两个部分的 Gaussian 贡献,确保在关节连接处过渡自然。
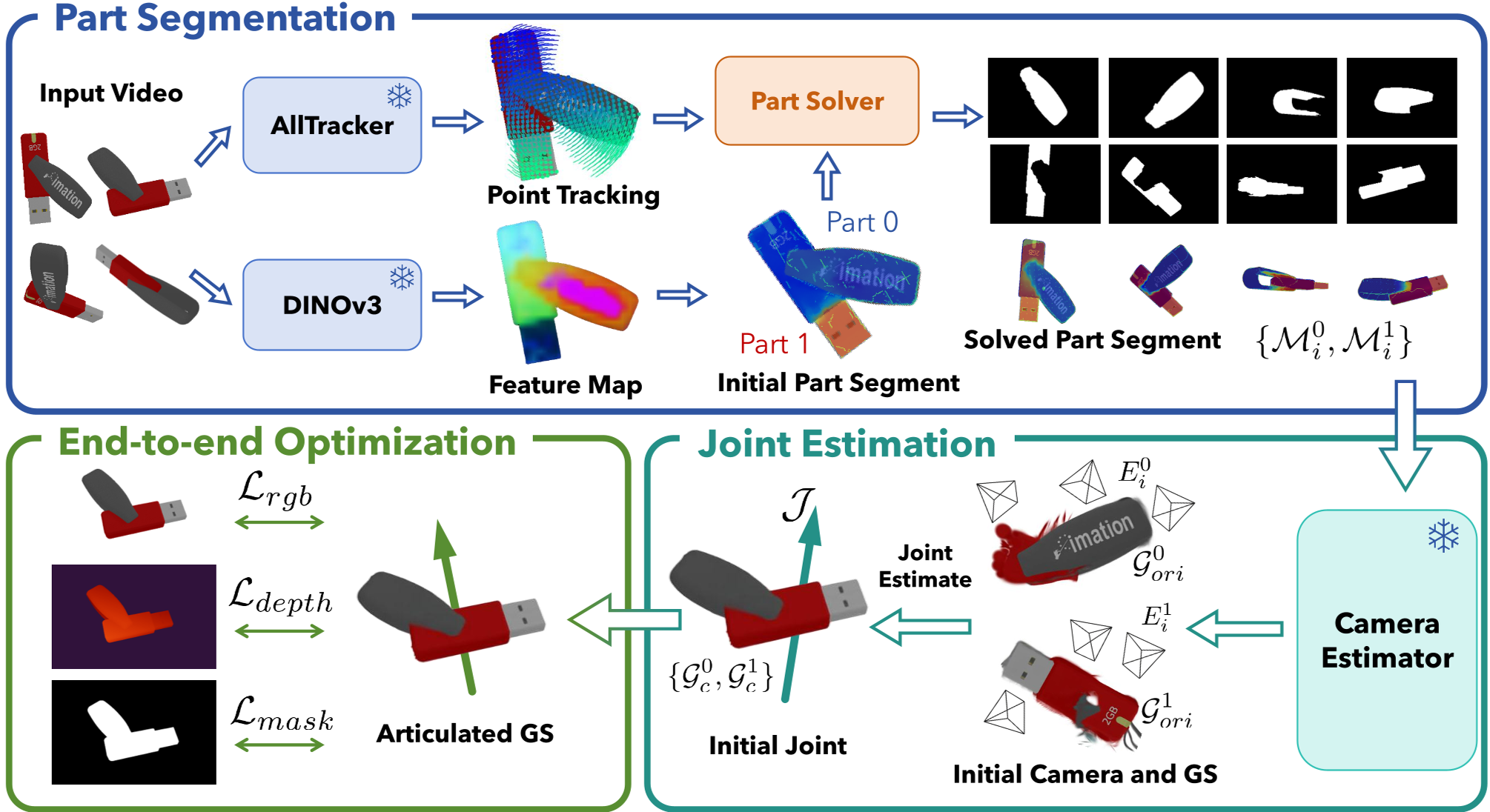 图 1:FreeArtGS 整体流程图,展示了从视频输入到最终带关节 3D 资产生成的全过程。
图 1:FreeArtGS 整体流程图,展示了从视频输入到最终带关节 3D 资产生成的全过程。
实验战绩与结果分析
基准测试:FreeArt-21
由于此前没有自由移动场景的评测集,作者构建了 FreeArt-21。实验结果显示,FreeArtGS 在关节轴线误差(~1.04°)和 Chamfer 距离上全面碾压前人工作。
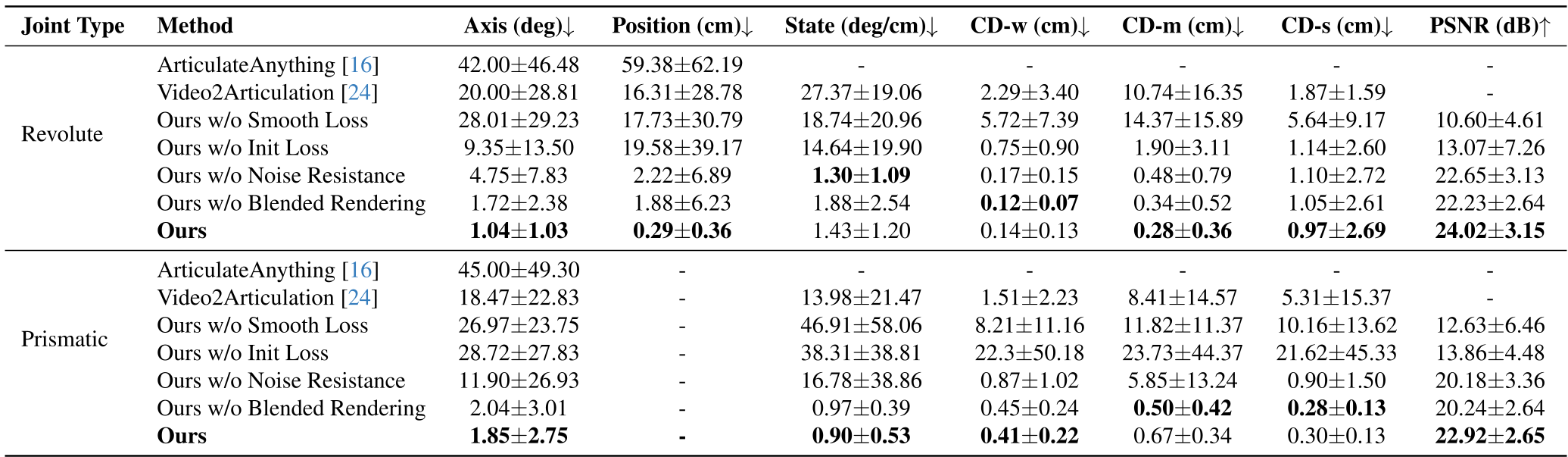 表 1:在旋转和平移关节任务下,FreeArtGS 的各项指标均达到 SOTA。
表 1:在旋转和平移关节任务下,FreeArtGS 的各项指标均达到 SOTA。
视觉表现
即使是剪刀这种极细、带有高反光的挑战性物体,FreeArtGS 也能精确还原其边缘几何,并保持动作的连贯性。
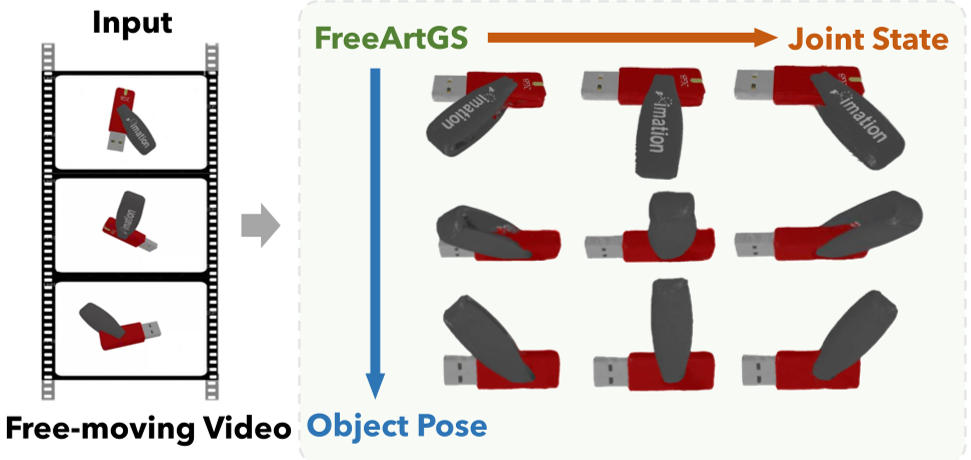 图 2:自由移动场景下的重建效果。注意在位姿剧烈波动时,重建模型依然能够紧密贴合真实关节状态。
图 2:自由移动场景下的重建效果。注意在位姿剧烈波动时,重建模型依然能够紧密贴合真实关节状态。
深度洞察 (Takeaway)
- 从运动中学习(Learning from Motion):本文证明了即使没有静态参考,纯粹靠两部分重构后的轨迹相关性,也足以推定高精度的物理关节。
- 端到端是必然趋势:传统的单纯几何优化往往存在漂移,通过 3DGS 联合优化视觉外观与位姿(Camera Pose Refinement),能大幅纠正前端点追踪带来的累积误差。
- 局限性:目前该系统主要针对双分块物体。对于复杂的多连杆结构(如机械臂),需要更复杂的分层拓扑估计支持。
总结
FreeArtGS 代表了衔接物体重建向“实用化”迈进的重要一步。它让单目视频生成可直接导入物理引擎(如 Sapien)的数字孪生成为可能,极大地降低了机器人仿真和 AR 资产制作的门槛。