本文提出了 GHOST (Gaussian Hand-Object SplaTting),这是一个基于 2D Gaussian Splatting 的快速、类别无关(Category-agnostic)的单目 RGB 视频手物交互重建框架。该方法通过引入几何先验检索和抓握感知对齐,在保持高保真渲染的同时,实现了 SOTA 级别的 3D 重建精度,且推理速度比同类方法快一个数量级。
TL;DR
在 AR/VR、机器人导航及具身智能领域,如何从一段普通的单目 RGB 视频中精准重构手与物体的 3D 交互一直是个难题。传统的 NeRF 方法虽然精细但慢得惊人。本文提出的 GHOST (Gaussian Hand-Object SplaTting) 框架,凭借 2D Gaussian Splatting 带来的高效能和独特的“几何先验补全”策略,不仅将重建精度推向 SOTA,更将处理速度提升了 13 倍 以上。
核心挑战:消失的几何与不合理的“悬空”
从单目 RGB 视频重构手物交互存在三个天然屏障:
- 严重遮挡 (Mutual Occlusion):手抓物体时,物体的一半可能都被挡住了;
- 尺度歧义 (Depth Ambiguities):单相机难以确定物体的真实物理大小;
- 计算开销:像 HOLD 这样的 SOTA 方法,优化一个 300 帧的序列需要 16 小时。
GHOST 的出现正是为了在“保真度”、“物理一致性”和“速度”之间找到那个完美的平衡点。
关键技术:GHOST 如何化腐朽为神奇?
1. 几何先验补全:看透遮挡
既然摄像头看不到被遮挡的部分,那就用“猜”的,但要有根据地猜。GHOST 利用 Vision-Language Model 提取物体标签(如 "盒装牛奶"),再通过 OpenShape 从包含千万级模型的 Objaverse 数据库中检索相似的 3D 模型。利用这些先验模型,GHOST 定义了 Geometric Consistency Loss (Lgeo),强迫高斯点云填充那些摄像头盲区,确保存储的物体是“实心”且完整的。
2. 抓握感知对齐 (Grasp-aware Alignment)
为了防止手和物体看起来像是在互相穿模或者隔空取物,GHOST 分析了手部和物体的运动轨迹。如果两者运动矢量相似度高,则判定为“抓握状态”。此时,模型会激活 Contact Loss,微调手的平移和物体的比例,确保 3D 空间中手掌与物体表面完美贴合。
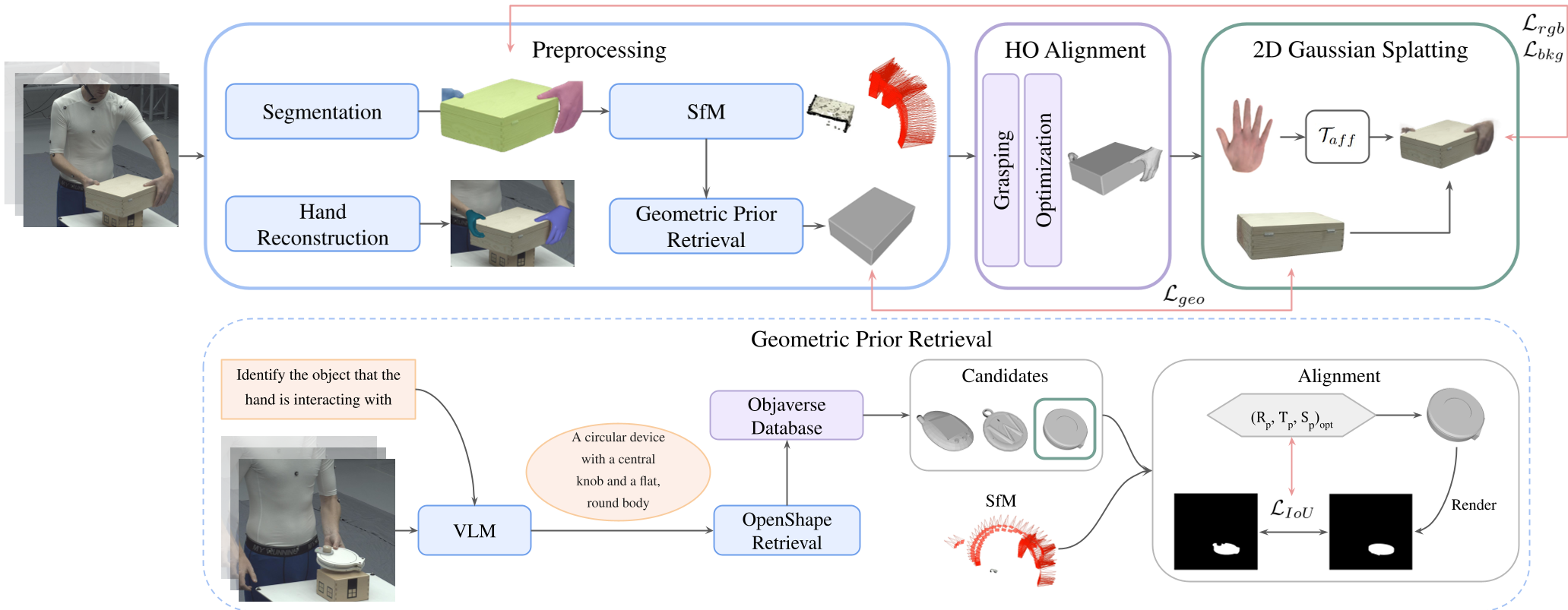 图 1:GHOST 整体流程,包含预处理、对齐优化和高斯泼溅阶段
图 1:GHOST 整体流程,包含预处理、对齐优化和高斯泼溅阶段
3. 基于高斯盘的动态建模
不同于传统的体积渲染,GHOST 将手和物体都建模为密集的 2D Gaussian Discs。对于手部这种形变体,它将高斯点绑定在 MANO 指数模型 的面片上,让高斯点随着手的骨骼动作自然形变;对于物体,则通过改进的背景损失函数,确保在高斯投影时不因遮挡而剔除掉关键部分。
实验战绩:速度与质量的双赢
在 ARCTIC 和 HO3D 等权威数据集上,GHOST 的表现令人惊艳:
- 效率极高:处理同样长度的视频,HOLD 需要 16 小时,BIGS 需要 13 小时,而 GHOST 仅需 1 小时。
- 渲染出色:即便在改变观察视角(Novel View)时,重建的物体依然保持了极高的细节(PSNR 提升显著)。
- 物理一致:生成的 3D 模型中,手部抓握动作极为自然,彻底消除了过往方法中常见的“由于遮挡导致的指尖消失”现象。
 图 2:在 ARCTIC 等数据集上的多视角渲染效果对比
图 2:在 ARCTIC 等数据集上的多视角渲染效果对比
深度洞察
GHOST 的成功在于它意识到:纯端到端的视觉重建在处理极端遮挡时是有上限的,必须引入外部世界的“结构化知识”(即 3D 先验数据库)。通过将检索到的几何先验与极速渲染的高斯泼溅结合,GHOST 成功绕过了 NeRF 漫长的收敛过程。
局限性与未来: 虽然 GHOST 在刚性物体上表现完美,但对于可变形体(如挤压一个解压球)或铰接类物体(如剪刀、笔记本电脑)的交互仍有待提升。未来的研究方向将聚焦于将这种快速高斯表示应用到更复杂的动力学场景中。
总结
GHOST 不仅仅是一个更快的重建算法,它为实时手物交互理解提供了一个切实可行的工程范式。对于追求极致效率的同时又不愿牺牲 3D 物理一致性的开发者来说,这篇工作无疑是目前的最佳实践。