本文提出了 MonoArt,一个从单张图像进行关节类物体(Articulated Objects)3D 重建的统一框架。该方法通过“渐进式结构推理”,实现了从几何生成、零件分割到运动参数估计的端到端预测,在 PartNet-Mobility 数据集上达到了 SOTA 性能,且推理速度极快。
TL;DR
传统的单目 3D 重建大多关注“静态”物体,但在现实世界中,笔记本电脑、柜子、微波炉等“关节类物体(Articulated Objects)”才是交互的核心。MonoArt 提出了一种基于**渐进式结构推理(Progressive Structural Reasoning)**的新范式,成功解决了从单张图片恢复 3D 几何、零件切割、运动轴以及运动限位的复杂挑战。
该工作不仅在精度上大幅超越此前的 PhysXAnything 和 Articulate-Anything,更将推理速度提升了一个量级(从分钟级缩短至秒级),为机器人实时操作提供了物理属性完备的“数字孪生”。
1. 关节物体的“三体”难题:几何、结构与运动
要从一张静态图片重建出一个能动的 3D 模型,模型必须同时理解三个维度:
- 几何(Geometry):物体长什么样?
- 零件(Part Structure):哪个部分是活页,哪个部分是底座?
- 运动学(Kinematics):它是旋转还是平移?轴心在哪里?运动范围是多少?
前人的工作要么靠“搜”(从零件库里检索拼凑,导致贴图错位),要么靠“猜”(利用大语言模型或视频生成模型补全,计算量巨大且物理精度差)。MonoArt 的核心直觉是:不要试图一步跨越,而是要分阶段、渐进式地将视觉观测转化为运动参数。
2. 核心架构:四阶递进式推理
MonoArt 将整个任务拆解为四个关键模块,这种解耦设计保证了预测的稳定性。
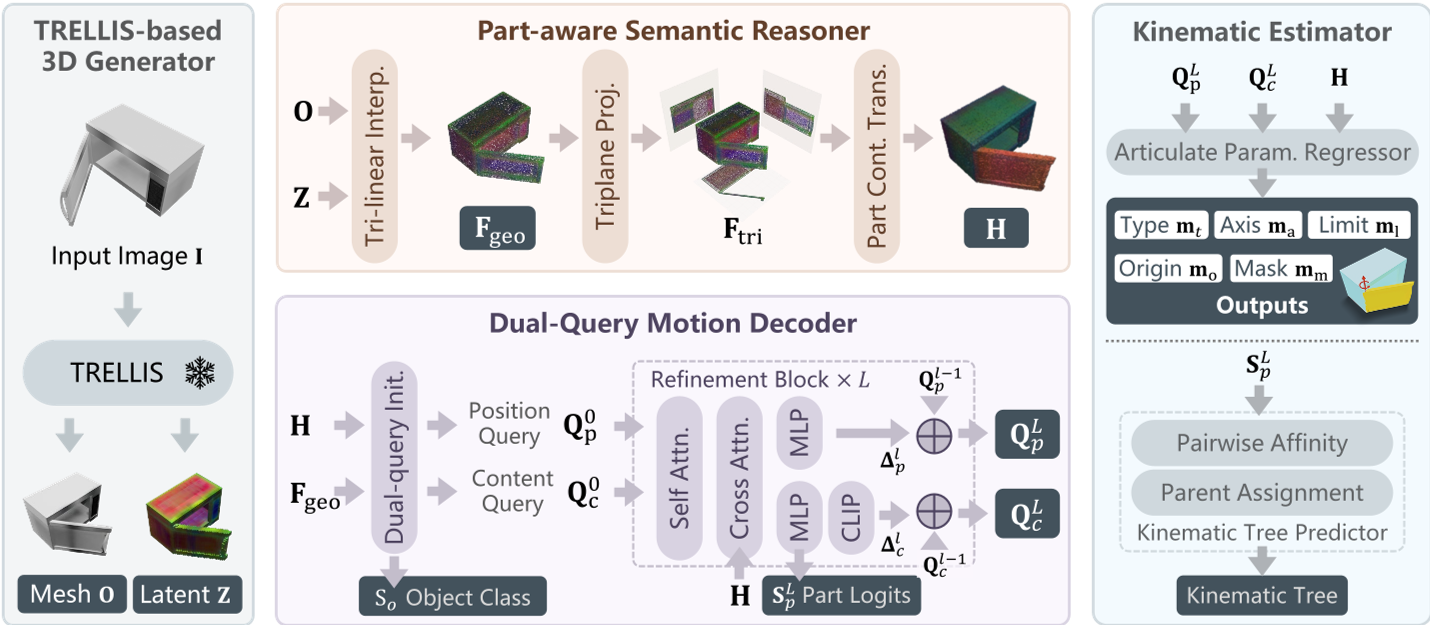
A. TRELLIS-based 几何生成
模型首先利用冻结的 TRELLIS 骨干网络生成物体的规范化形状(Canonical Geometry)和结构化的稀疏体素潜变量(Sparse Voxel Latents)。这为后续的零件划分提供了一个稳健的几何底盘。
B. 零件感知语义推理器 (PASR)
利用三线性插值将 3D 点云与体素体特征对齐,并投影到三平面(Triplane)空间进行 Transformer 处理。这里引入了 Triplet Loss(三元组损失) 进行监督,强迫模型学习到具有判别性的点云特征,使同一零件内部特征紧凑,不同零件间特征分离。
C. 双查询运动解码器 (Dual-Query Motion Decoder)
这是 MonoArt 的神来之笔。它采用“双查询”机制:
- 内容查询 (Content Query):编码零件的语义信息(“这是一个门”)。
- 位置查询 (Position Query):代表空间运动锚点(“轴在这里”)。 通过多层堆叠的 Refinement Block 迭代修正,模型能够自动确定物体的零件数量并精准定位。
D. 运动参数估算器
最后,将回归后的 Query 转化为关节类型(旋转、平移等)、轴向、枢纽位置和运动限位,并构建父子关系的运动树。
3. 实验战绩:精度与速度的双重碾压
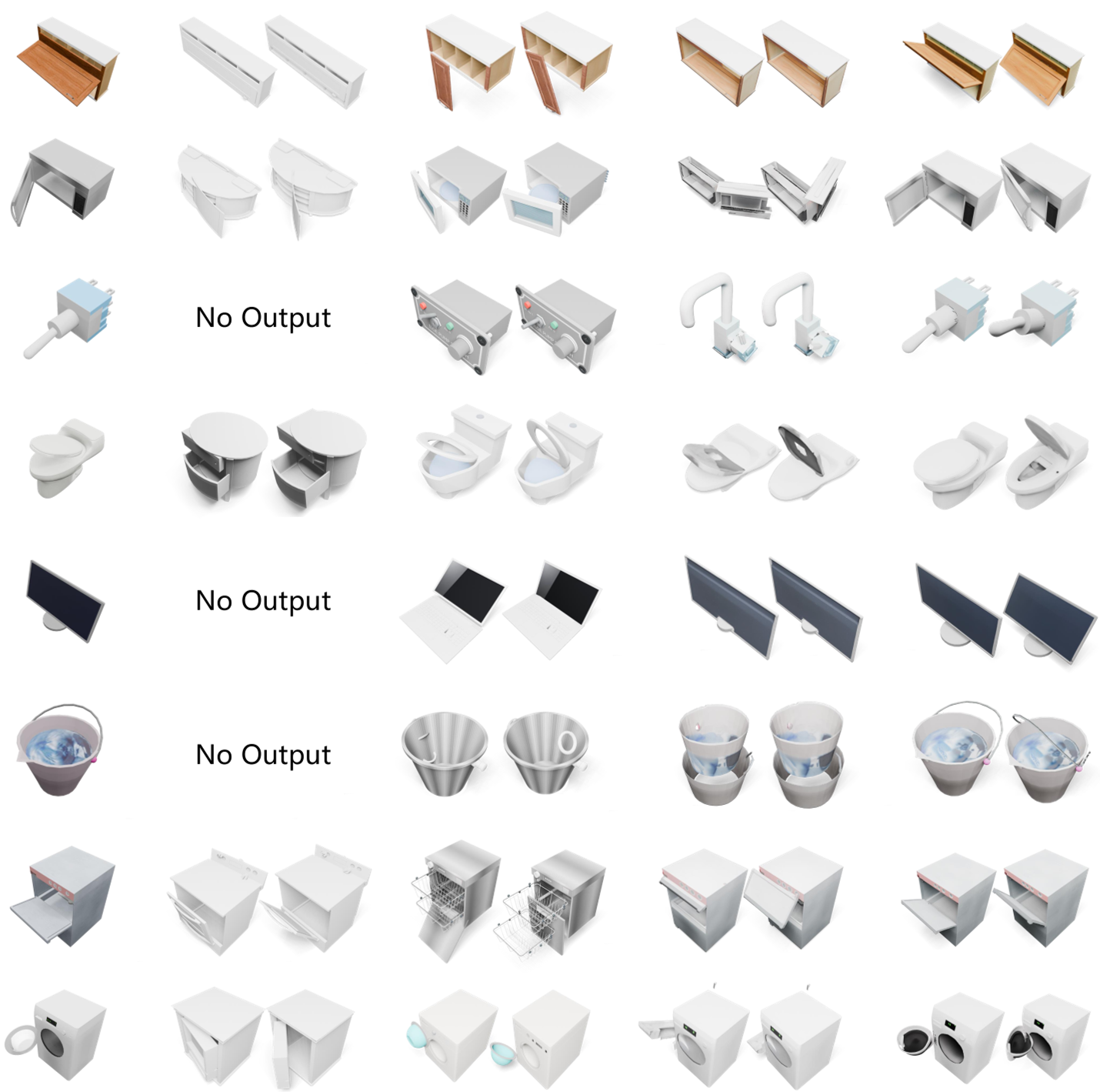
在 PartNet-Mobility 数据集的 46 个类别测试中,MonoArt 表现出极强的泛化性:

- 运动学精度:枢轴误差(Pivot Err)仅为 0.108,远低于 PhysXAny 的 0.173,这意味着预测的“开门方向和位置”更加符合真实物理逻辑。
- 推理速度:如图 1 所示,MonoArt 的推理耗时约 20.5 秒,而之前的 SOTA 方法如 Articulate-Anything 需要超过 200 秒。
4. 深度洞察:为什么 MonoArt 这么快且准?
- 避免了不必要的“生成”成本:此前的方法依赖极其耗时的视频扩散模型来提取运动线索,而 MonoArt 证明了通过单图提取的几何特征结合强约束的检索/回归,足以推断出运动逻辑。
- 显式 3D 先验的威力:通过 Triplane 和稀疏体素的结合,模型能够获得极强的 Inductive Bias(归纳偏置),这比单纯依靠 Vision-Language 模型(如 GPT-4V)来盲猜参数要可靠得多。
- 从 Real 到 Sim 的落地能力:论文展示了在 IsaacSim 中直接操作 MonoArt 生成的模型,这对于机器人自动抓取和开启柜门等 Contact-rich 任务至关重要。
5. 局限性与展望
尽管表现优异,MonoArt 在面对极端比例悬殊的模型(如大打印机上的微小按钮)时,由于均匀采样的限制,容易丢失微小零件。此外,对于完全未见过的异形拓扑结构,其参数回归仍有优化空间。
总结:MonoArt 是目前单目关节 3D 重建领域最均衡的选择,它兼顾了物理真实性与计算效率,是通往真实环境实时语义建模的重要里程碑。