This paper presents a theoretical and architectural framework for Physical AI agents based on Active Inference (AIF) and the Free Energy Principle (FEP). It introduces a computationally homogeneous design where perception, learning, and control are unified through Variational Free Energy (VFE) minimization, realized via reactive message passing on Forney-style factor graphs to meet real-world resource constraints.
Executive Summary
TL;DR: This paper argues that the next leap in robotics won't come from better "modules," but from a unified mathematical foundation. By adopting Active Inference (AIF), the author demonstrates how perception, planning, and control can be collapsed into a single act of Variational Free Energy (VFE) minimization. This process is realized through Reactive Message Passing, a distributed architecture that thrives under the messy, resource-constrained realities of the physical world.
Positioning: This is a foundational architectural manifesto. It bridges the gap between the high-level physics of the Free Energy Principle and the low-level requirements of real-time engineering.
The Performance Gap: Why Toddlers Beat Robots
Current AI (like LLMs) can rival experts in coding, yet the best humanoid robots at the 2025 RoboCup still look clumsy compared to a human toddler. The author identifies the culprit: Fragmented Engineering. We typically build robots by stitching together a "vision module," a "PID controller," and a "path planner." Each has its own objective function, leading to brittle interfaces and failures under pressure.
Biological systems don't have these interfaces. They operate under a single principle: maintaining structural integrity by minimizing surprise (Free Energy).
Methodology: The Path to Active Inference
The author builds a "logical chain" from basic probability theory to complex agent behavior:
- Variational Inference (VI): Instead of the impossible task of calculating exact Bayesian posteriors, we treat inference as an optimization problem (minimizing VFE).
- Expected Free Energy (EFE): When looking at the future, the agent doesn't just look for "reward." It evaluates policies based on Risk (distance from goals) and Ambiguity (potential to gain new information). Curiosity is not "bolted on"; it is a mathematical necessity for survival.
Architecture: The Factor Graph Realization
To make this practical, the paper utilizes Forney-style Factor Graphs (FFG).
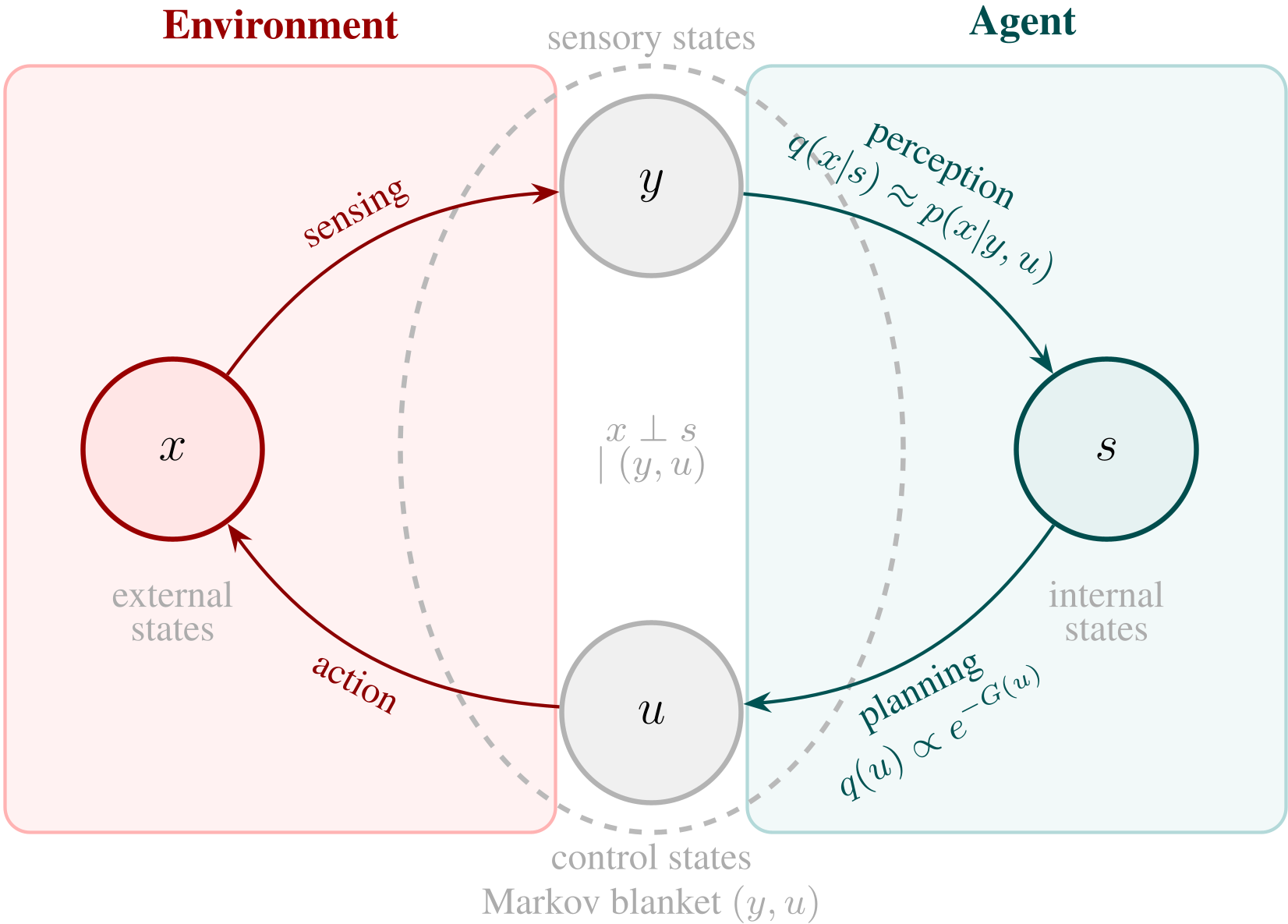 Figure 1: The Markov Blanket partition. Internal states (s) are separated from external states (x) by sensory (y) and active (u) states.
Figure 1: The Markov Blanket partition. Internal states (s) are separated from external states (x) by sensory (y) and active (u) states.
In this setup, every node is an autonomous computational unit. When a sensor clicks, it sends a "message" to its neighbors. The global "thought" of the robot emerges from these local, parallel updates. This is Reactive Message Passing.
Real-World Robustness: Designing for Chaos
Why is message passing better than a central controller?
- Graceful Degradation: If the battery is low (power fluctuation), the agent can switch to simpler "mean-field" math at the local node level without rewriting the global code.
- Anytime Inference: If a robot needs to kick the ball now (deadline fluctuation), it simply uses the most recent message available. It doesn't crash while waiting for a loop to finish.
- Asynchronous Data: Unlike traditional models that need "synced" snapshots, reactive graphs process data the microsecond it arrives.
Computational Homogeneity: A "Blanket of Blankets"
One of the paper's most profound insights is nesting. Because the math of VFE is scale-invariant, we can treat a single sensor as an AIF agent, a whole robot as an AIF agent, and a team of robots as a "collective" AIF agent.
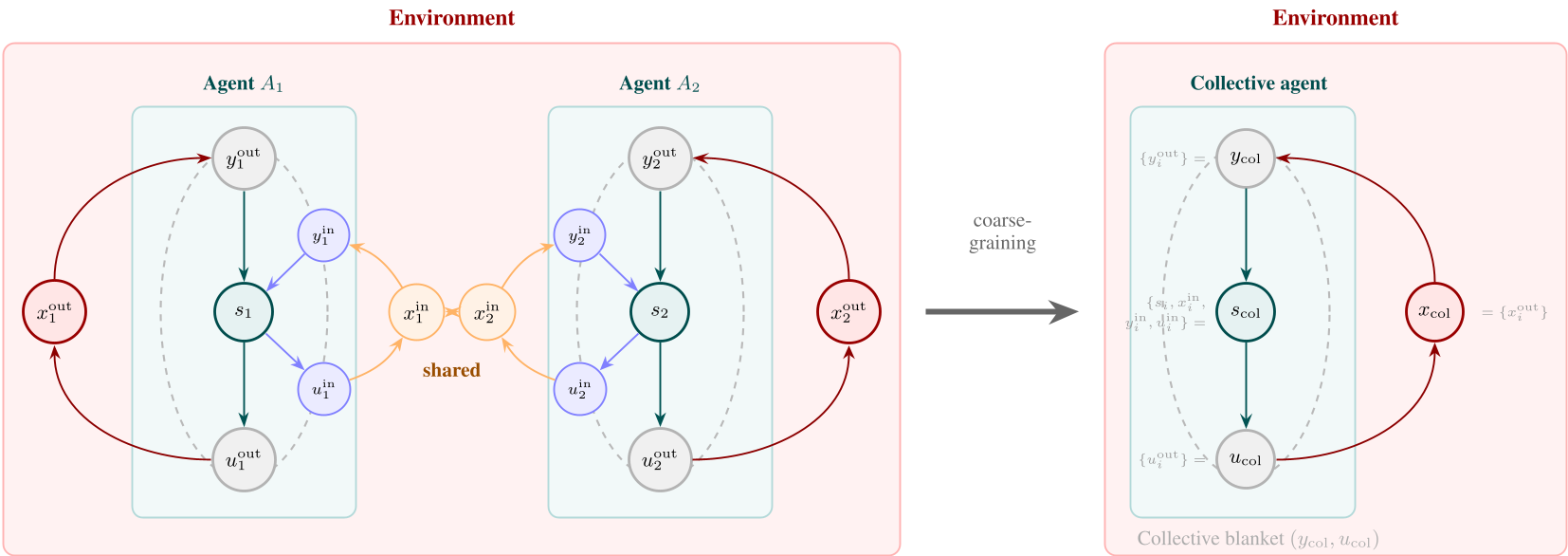 Figure 2: Coarse-graining multiple agents into one "collective" agent. Notice how the same message-passing primitive works at every scale.
Figure 2: Coarse-graining multiple agents into one "collective" agent. Notice how the same message-passing primitive works at every scale.
This implies a future for hardware: we don't need "central CPUs" as much as we need "tiled message-passing elements" that mirror the topology of the factor graph.
Critical Perspective
While the theoretical case is "solid," the author admits the engineering case is unvalidated. We lack:
- Production-grade tooling: While
RxInfer.jlis a great start, it's not yet ROS-ready for industrial scale. - Hybrid Talent: We need engineers who understand both stochastic differential equations and real-time C++/Julia.
Conclusion
Active Inference offers a "Unified Field Theory" for robotics. By replacing the disparate goals of RL and Control Theory with the single objective of VFE minimization, we move closer to "Physical AI" that learns, explores, and survives with the fluid grace of a biological organism.