AGILE is a comprehensive, end-to-end reinforcement learning (RL) workflow built on Isaac Lab and RSL-RL for humanoid robots. It standardizes the lifecycle from environment verification and reproducible training to unified evaluation and descriptor-driven deployment, achieving SOTA reliability in transferring diverse skills like loco-manipulation and fall recovery to real hardware (Unitree G1, Booster T1).
TL;DR
The transition of humanoid robots from simulation to the real world is often plagued by "silent bugs" in environment configuration and fragile deployment scripts. AGILE (A Generic Isaac-Lab based Engine) introduces a rigorous four-stage engineering workflow—Prepare, Train, Evaluate, and Deploy—that standardizes humanoid RL. By integrating algorithmic stabilizers like L2C2 and value-bootstrapped terminations with a descriptor-driven deployment system, AGILE enables complex behaviors (loco-manipulation, recovery, imitation) to transfer seamlessly to Unitree G1 and Booster T1 platforms.
The "Workflow Gap": Why Humanoid RL is Hard
In the current academic landscape, we have massive simulation throughput (thanks to Isaac Gym/Lab), yet humanoid robots still struggle to walk reliably in the "wild." The authors identify two primary bottlenecks:
- The Workflow Gap: Researchers often discover simple errors—like a flipped joint axis or an improperly scaled reward—only after days of GPU training.
- The Transfer Gap: Moving a policy from one simulator (Isaac) to another (MuJoCo) or to real hardware usually requires manual re-coding of observation buffers and joint mappings, which is highly error-prone.
Methodology: The Four Pillars of AGILE
AGILE reframes RL as a structured engineering process rather than a collection of loose scripts.
1. Interactive Verification (The "Prepare" Phase)
Before committing GPU hours, AGILE provides GUI plugins to verify the MDP. This includes a Joint Position GUI with symmetry modes to catch mirrored sign errors and a Reward Visualizer to see real-time reward contributions during manual scene manipulation.
2. Algorithmic Toolbox (The "Train" Phase)
AGILE doesn't just provide a loop; it includes a library of "stabilities" crucial for humanoids:
- L2C2 Regularization: Enforces Lipschitz continuity to ensure smooth actions, preventing high-frequency jitter that destroys real actuators.
- Value-Bootstrapped Terminations: Solves the "suicidal agent" problem (where agents prefer dying to accumulating negative rewards) by bootstrapping the value function at terminal states, making resets value-neutral.
- Virtual Harness: A curriculum-based external force that supports the robot during early training, much like a baby walker.

3. Unified Evaluation (The "Evaluate" Phase)
Instead of only relying on stochastic (random) rollouts which have high variance, AGILE uses Deterministic Scenarios. By feeding parallel environments identical command sequences (e.g., a specific velocity ramp), researchers can perform precise regression testing across different model versions or simulators.
4. Descriptor-Driven Deployment (The "Deploy" Phase)
Every trained policy is exported with a YAML I/O Descriptor. This file acts as a "contract" that specifies joint names, observation order, and scaling. Whether you are running a Sim2Sim validation in MuJoCo or the final Sim2Real on a Unitree G1, the inference engine remains identical.
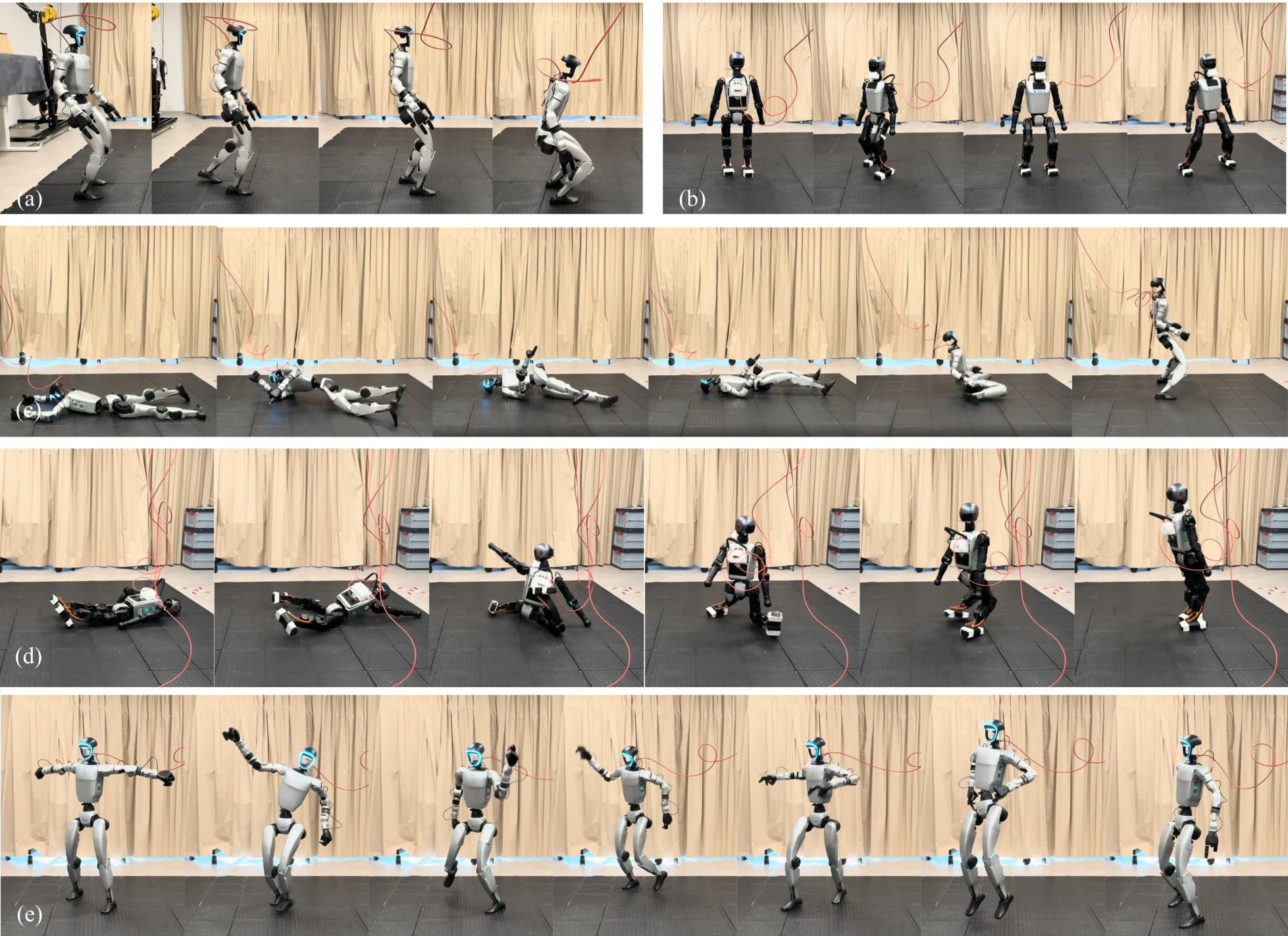
Experimental Results: From Dancing to VLA Pick-and-Place
The workflow was validated across five distinct tasks. Notably, the Decoupled Whole-Body Control strategy allowed the robot to use a frozen RL policy for leg stability while an independent vision-language (VLA) module controlled the upper body for manipulation.
Critical Insights from Ablations
- Smoothness Matters: L2C2 was shown to drastically reduce RMS joint jerk and energy consumption above 10Hz, which is the "death zone" for real-world motors.
- Stability: The Virtual Harness significantly reduced seed variance, ensuring that training doesn't fail simply because of a "bad" random initialization.
Critical Analysis & Conclusion
Takeaway: AGILE proves that the "secret sauce" of successful humanoid deployment isn't just a better PPO variant—it's the infrastructure that ensures the data entering and leaving the model is consistent across environments.
Limitations: Currently, AGILE is optimized for Isaac Lab. While it supports MuJoCo for evaluation, the training still relies heavily on NVIDIA's specific ecosystem. Furthermore, it primarily focuses on proprioceptive tasks; adding a standardized pipeline for complex "eye-to-hand" coordination remains the next frontier.
Future Outlook: By open-sourcing these "best practices" and I/O contracts, the authors are setting a standard for how humanoid research should be reported and reproduced, moving the field from "black magic" to professional robotics engineering.