本文提出了 DCARL,一种针对长轨迹视频生成的“分而治之”自回归框架。该方法通过解耦全局关键帧生成与局部密集帧插值,结合视频扩散模型(VDM),在保持高保真度的同时,实现了长达 32 秒的稳定、可控视频生成。
TL;DR
长轨迹视频生成一直是世界模型领域的“硬骨头”。传统的自回归(Autoregressive)模型虽然理论上能无限生成,但现实中常陷入视觉崩溃和轨迹偏离的泥潭。南加州大学团队提出的 DCARL 框架,通过一套“分而治之”的机制,利用全局关键帧(Keyframes)作为结构锚点,成功实现了 32 秒高保真、精准可控的视频创作,将长序列生成的稳定性推向了新高度。
痛点深挖:自回归消失的稳定性
在生成长达数十秒甚至分钟级的视频时,现有的视频扩散模型(VDMs)面临两大挑战:
- 计算爆炸:一次性预测几百帧的显存成本高不可攀。
- 曝光偏差(Exposure Bias):自回归模型在每一步生成时都会引入微小误差。随着时间推移,这些误差会像滚雪球一样累积,导致后续帧彻底偏离原始相机轨迹(ATE 激增)或产生严重的视觉伪影。
作者通过数学推导(Proposition 1)证明:在没有修正机制的情况下,纯自回归生成的累积误差随长度 呈线性甚至指数级增长( 或 )。
方法论详解:全局锚定与局部插值
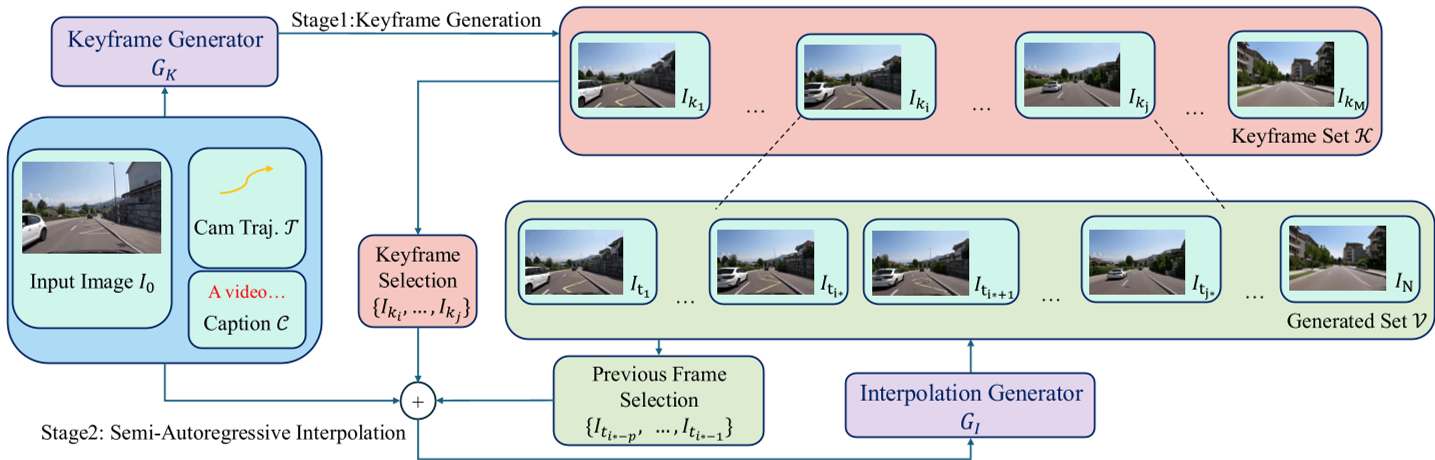
DCARL 的核心直觉是:先规划骨架,再填充血肉。
1. 架构解析:双生成器协同
DCARL 放弃了单一的自回归链路,转而构建了两个专门设计的生成器:
- 关键帧生成器 (Keyframe Generator):它不再按照时间顺序一个一个生,而是“联合”生成跨越整个时间轴的稀疏关键帧。这种非因果的设计确立了全局的语义和几何一致性,消除了长程漂移。
- 插值生成器 (Interpolation Generator):它在左右关键帧的约束下,配合上一段生成的历史帧,填充中间的密集帧。
2. 三大核心创新设计
为了解决插值过程中的常见病灶,作者引入了:
- Spatial-Structural Preservation:关键帧编码时不进行时间压缩,确保大幅度相机运动下的空间细节不丢失。
- Motion-Inductive Noisy Conditioning:如果直接给模型喂干净的关键帧,模型会学会偷懒(直接复制像素),导致视频卡顿。通过给条件帧加入适量噪声,逼迫模型去学习“如何运动”。
- Seamless Boundary Consistency:通过潜在空间替换(Latent Substitution)和一致性训练,消除了段落连接处的闪烁和跳变。
实验与结果:统治级的长序列稳定性
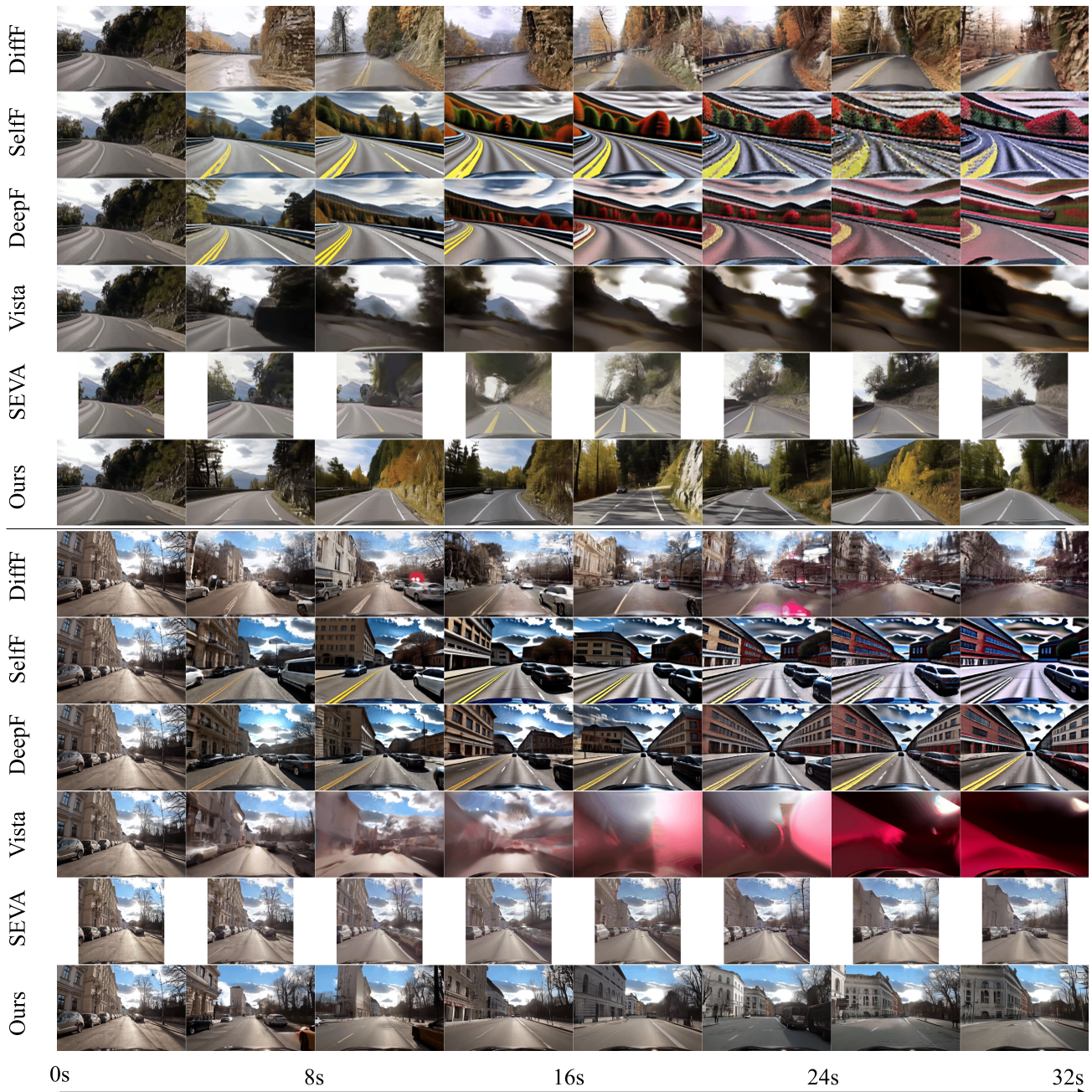
在 OpenDV-YouTube 这一极具挑战性的真实驾驶数据集上,DCARL 展现了惊人的耐力。
- 画质与一致性:在 24-32 秒的超长区间,传统方法(如 DiffF)的 FVD 往往飙升至 1000 以上,而 DCARL 依然维持在 300 左右。
- 相机依从性:相较于 SEVA 等强基线,DCARL 的旋转误差 ARE 下降了约 10%,平移误差 ATE 也有显著优化。
消融实验揭秘
关键帧锚点到底有多重要?实验显示,一旦去掉关键帧约束(w/o Keyframe),模型在面对大角度弯道时会彻底“失控”,场景发生扭曲且轨迹偏离。

深度洞察:未来世界模型的基石
DCARL 的成功不仅在于 SOTA 的分数,更在于它提供了一种误差收敛的理论证明。通过将误差限制在段落内部,它打破了长序列生成“必崩”的魔咒。
局限性与展望: 尽管表现卓越,DCARL 目前在处理极端长距离感知(如超远处的微小地标锚定)和罕见长尾场景(如穿过无照明隧道后的突变)时仍有挑战。作者指出,未来的研究可以将该框架与 3D 基础模型蒸馏结合,进一步提升关键帧的物理精确度。
总结 (Takeaway): 对于自动驾驶和虚拟制作者来说,DCARL 证明了自回归模型不再是“不可控”的代名词。只要通过分层架构引入合理的全局先验,长轨迹的高质量实时仿真指日可待。