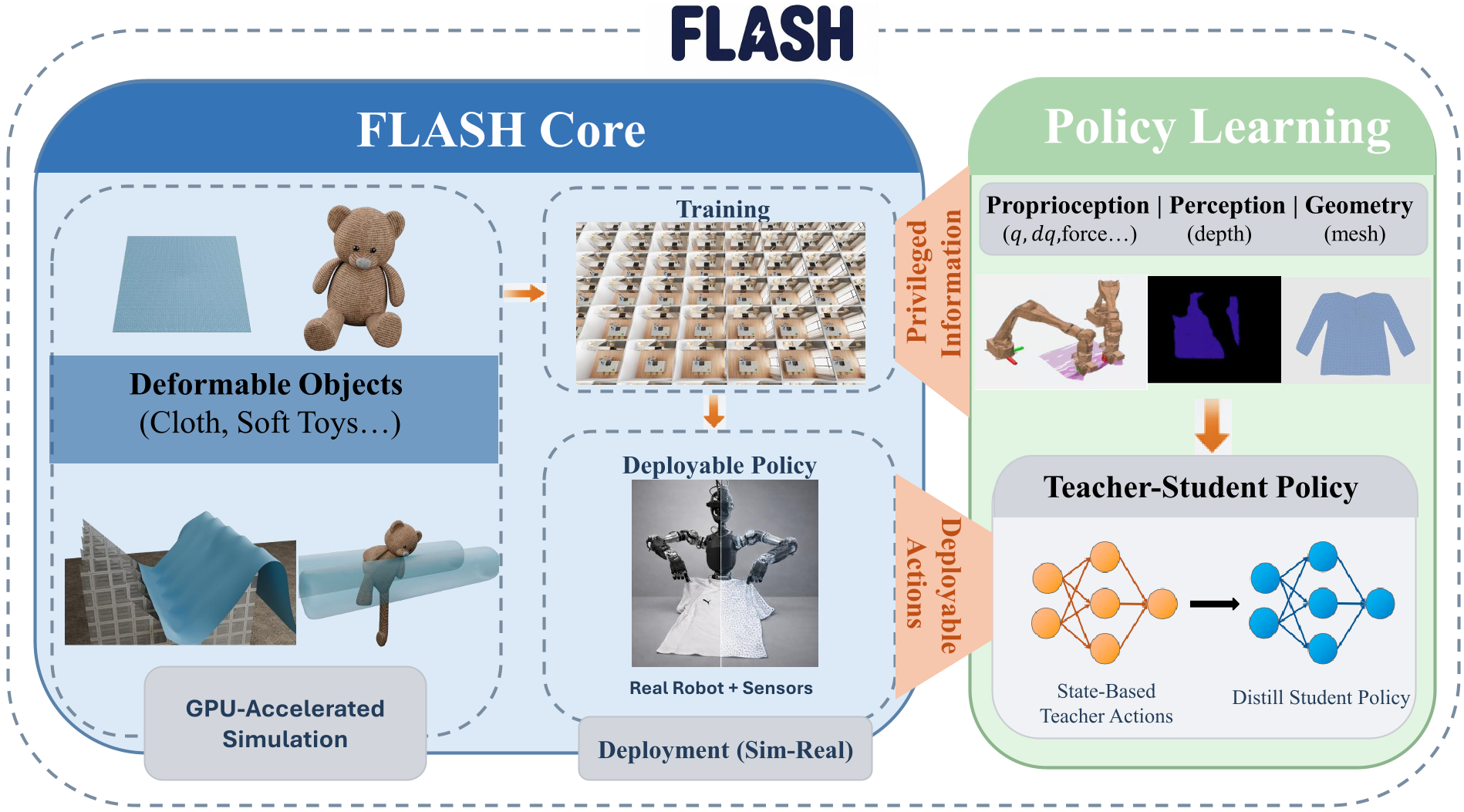
FLASH is a GPU-native simulation framework designed for high-fidelity deformable object manipulation, featuring an optimized NCP-based solver and a lightweight non-smooth Newton method. It achieves real-time simulation of over 3 million degrees of freedom at 30 FPS, enabling the training of robust manipulation policies in minutes that support zero-shot sim-to-real transfer.
Executive Summary
TL;DR: FLASH is a groundbreaking GPU-accelerated simulation framework that bridges the gap between high-fidelity physics and massive computational throughput. By redesigning the physics engine from the ground up for modern GPU architectures, it enables the training of dual-arm garment folding policies in minutes—not days—and facilitates seamless zero-shot sim-to-real transfer.
In the landscape of robotic learning, FLASH represents a "SOTA shift." While previous work struggled with the "sim-to-real gap" in soft materials due to unstable contact modeling, FLASH provides a physically accurate, high-throughput environment that treats simulation as a first-class citizen in the learning pipeline.
The Bottleneck: Why Soft Bodies are Hard
Simulating rigid bodies is relatively mature, but deformable manipulation (like folding a T-shirt or a towel) is a nightmare for traditional engines. The geometry is constantly changing, the degrees of freedom (DoF) are massive, and the contacts are "rich" and friction-dependent.
Prior works like Isaac Sim (PBD) or Genesis (MPM) often fall into two traps:
- Inaccuracy: They use simplifications that lead to "snapping" behaviors or unrealistic sliding.
- Slowness: They fail to fully utilize GPU parallelism because their solvers (like the Schur-complement in contact resolution) create dense bottlenecks that don't scale with the number of parallel environments.
Methodology: The "Lightweight" Newton Solver
The core innovation of FLASH lies in its numerical solver. Traditional high-fidelity solvers use a Non-smooth Newton method to solve the system:
Usually, the inverse of the system matrix is dense, which makes the Schur complement () a computational disaster on GPUs.
The FLASH Insight: Authors approximate this with an inertia-dominated metric ().
- This keeps the system sparse.
- It allows multiple environments to be stacked in a block-diagonal format.
- It maps perfectly to GPU sparse primitives, allowing the engine to solve for millions of vertices simultaneously.
Experiments & Results: Physics that Matters
The researchers tested FLASH against the industry's best: Isaac Sim, Genesis, and Newton.
The T-Shirt Test: In a dual-sleeve folding task, FLASH was the only simulator that matched real-world physics. Genesis showed "elastic snapping," while Isaac Sim suffered from "shear-like distortions." FLASH produced smooth, symmetric folds with accurate frictional sticking.

Scalability: FLASH handles 128 parallel environments (over 3 million DoF) while maintaining 30 FPS. This throughput allowed a humanoid robot (AdamU) to learn garment folding tasks in a few hours of wall-clock time.
Zero-Shot Sim-to-Real: The paper demonstrates successful deployment on physical robots (Airbot Play and AdamU) for towel, shorts, and T-shirt folding. The policies showed reactive recovery: if a human pulls the towel away mid-fold, the robot re-calculates and re-attempts the grasp—all without a single real-world training sample.
Deep Insight & Conclusion
Takeaway
The success of FLASH proves that we don't necessarily need "Real-to-Sim" parameter tuning or residual delta learning if the underlying physics engine is fundamentally sound and fast enough to support massive Domain Randomization.
Limitations
- Perception Bottleneck: Most failures in the real world weren't due to physics but depth sensor noise.
- Hardware Abstraction: The model assumes a binary "grasp" rather than modeling the complex motor-level dynamics of a gripper, which can lead to slight tracking deviations.
Future Outlook
FLASH opens the door for Foundational Models for Deformable Objects. By being able to generate millions of high-fidelity interaction trajectories in hours, we can finally apply the "Large Model" paradigm to the messy, soft, and unpredictable world of laundry and fabric manipulation.
Technical Review by Senior Academic Tech Editor.