This paper introduces AirVLA, a system that transfers the π0 Vision-Language-Action (VLA) foundation model to underactuated aerial manipulators. By combining fine-tuning with a Physics-Aware Guidance mechanism and Gaussian Splatting-based data synthesis, the system achieves a 50% success rate in real-world pick-and-place and 100% in navigation tasks.
TL;DR
AirVLA is the first systematic study of transferring a manipulation-pretrained Vision-Language-Action (VLA) model—specifically π0—to an aerial platform. By introducing physics-aware guidance to handle payload disturbances and Gaussian Splatting to synthesize training data, the researchers bridged the gap between static tabletop manipulation and the dynamic, underactuated world of drone flight.
Context: Most VLA models (like RT-X or Octo) thrive on fixed-base robots. Applying them to drones is a "stress test" for cross-embodiment learning, as drones must fight gravity while executing precise contacts.
The Dynamics Gap: Why Drones Break Standard VLAs
Traditional VLA models assume a quasi-static environment. If a robot arm picks up a 200g object, the base doesn't move. If a drone picks up a 200g object, the entire "base" (the drone itself) sags due to the center-of-mass shift and increased weight.
Current VLAs fail here because:
- Underactuation: Attitude and thrust are tightly coupled; a small error in a predicted "grasp" action can lead to a catastrophic crash.
- Ego-motion: Onboard cameras move violently compared to stable tabletop cameras.
- Data Scarcity: There are no massive "Open X-Embodiment" datasets for flying manipulators.
Methodology: Guiding the Generative Flow
The core innovation is Payload-Aware Guidance. Since π0 is a flow-matching model (a type of generative model), the authors don't just "take" the output. Instead, they steer the sampling process at inference time.
1. Physics-Informed Steering
The system defines a loss function that captures physical constraints (like "don't sag when the gripper is closed"). During the iterative denoising process, the model calculates the gradient of this loss to nudge the action trajectory toward a physically feasible one.
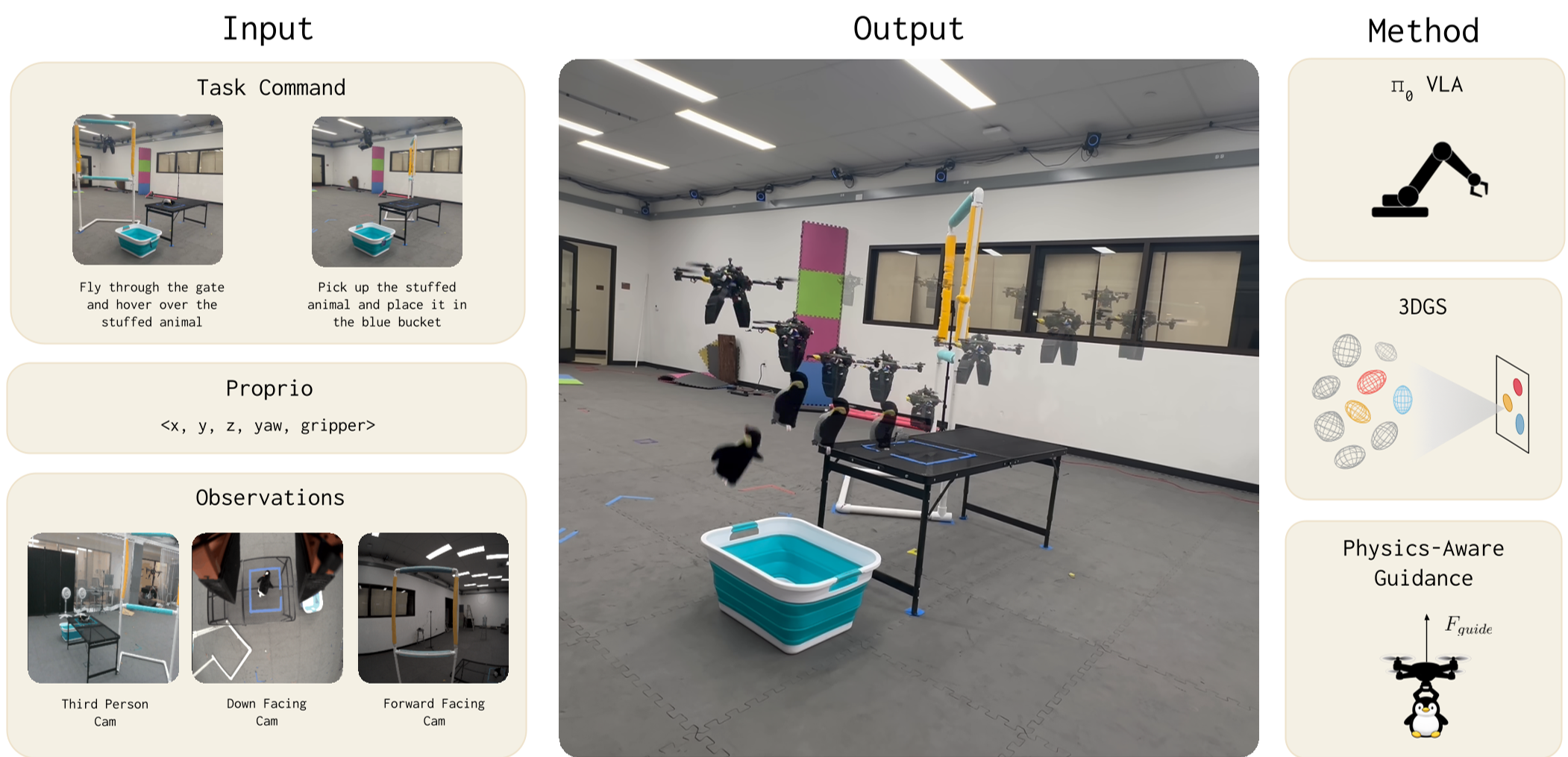
2. Gaussian Splatting (3DGS) Synthesis
To fix the data scarcity problem, the team used 3DGS to create photorealistic "digital twins" of the environment. They then simulated drone trajectories (including recovery maneuvers) and rendered "synthetic demonstrations" to teach the model how to navigate through gates and recover from near-collisions.
Experimental Battleground
The model was tested on three tiers: Penguin Grasp (Manipulation), Gate Navigation, and Compositional (Navigate + Grasp).
Key Results:
- Baseline π0: 0% success in picking and placing (the drone simply couldn't handle the physics of the payload).
- AirVLA (RTC + Guidance): 50% success in pick-and-place.
- Navigation: Synthetic data boosted success from 81% to 100%.

Zero-Shot Composition
Perhaps the most impressive feat was the zero-shot performance. The model was never trained on the full "Fly through a gate THEN pick up the penguin" sequence. However, because it learned the atomic skills and language grounding, it achieved a 62% success rate on this complex multi-stage task.
Critical Insight & Future Outlook
The AirVLA project proves that visual and semantic representations from large-scale pretraining (like knowing what a "penguin" looks like and how a gripper should approach it) do transfer to drones. However, low-level control dynamics do not.
The Takeaway: We don't need to retrain foundation models for every new robot shape. Instead, we can use "Inference-time Intervention"—layering physics engines or simple control laws on top of the generative sampler—to make a "ground-based" brain work in the air.
Limitations: The system still relies on motion capture for high-precision localization. The next frontier? Moving to full onboard VIO (Visual Inertial Odometry) for multi-room, outdoor aerial manipulation.