本文提出了 Multi-Dependency PIBT (MD-PIBT),一个处理多智能体路径规划 (MAPF) 的通用框架。该方法通过引入“智能体依赖图 (AgDG)”重新诠释了经典的 PIBT 算法,使其能够同时处理多个智能体间的冲突,并支持多步预测规划。
TL;DR
在现代自动化仓储和物流系统中,如何在动态拥挤的环境中为数千个机器人实时规划无碰撞路径是一项巨大挑战。本文介绍的 MD-PIBT (Multi-Dependency PIBT) 通过引入智能体依赖图 (Agent Dependency Graph),突破了传统 PIBT 算法无法同时处理多个机器人冲突的限制。实验表明,MD-PIBT 不仅能完美兼容现有 SOTA 方法,在处理大型机器人(Large Agents)时的成功率更是实现了代际跨越。
痛点深挖:PIBT 的“单线思维”局限
传统的 Priority Inheritance with Backtracking (PIBT) 及其扩展版 EPIBT 是目前解决大规模 MAPF 问题的核心算法,主打一个“快”字。其核心逻辑是:如果高优先级机器人 A 的路径挡住了低优先级机器人 B,B 就临时继承 A 的优先级并尝试让路。
然而,这种逻辑存在一个致命伤:它假设一个动作最多只涉及两个智能体之间的冲突。
- 多步规划失效:当进行多步(Windowed)预测时,机器人 A 可能同时挡住 B、C、D。
- 大型机器人困境:一个体积巨大的机器人由于占据多个网格,天然容易同时与多个小机器人发生碰撞。 在这种情况下,旧算法往往因无法处理复杂的“多重依赖”而导致严重的死锁(Deadlock)或活锁(Livelock)。
核心机制:重构依赖图 (Agent Dependency Graph)
MD-PIBT 的天才之处在于将规划过程看作是在依赖图上的搜索。作者定义了两种核心依赖:
- 硬依赖 (Hard Dependency):机器人 的预选路径与尚未规划的 的安全路径冲突。
- 软依赖 (Soft Dependency): 的预选路径与已经规划好暂定路径的 的安全路径冲突。
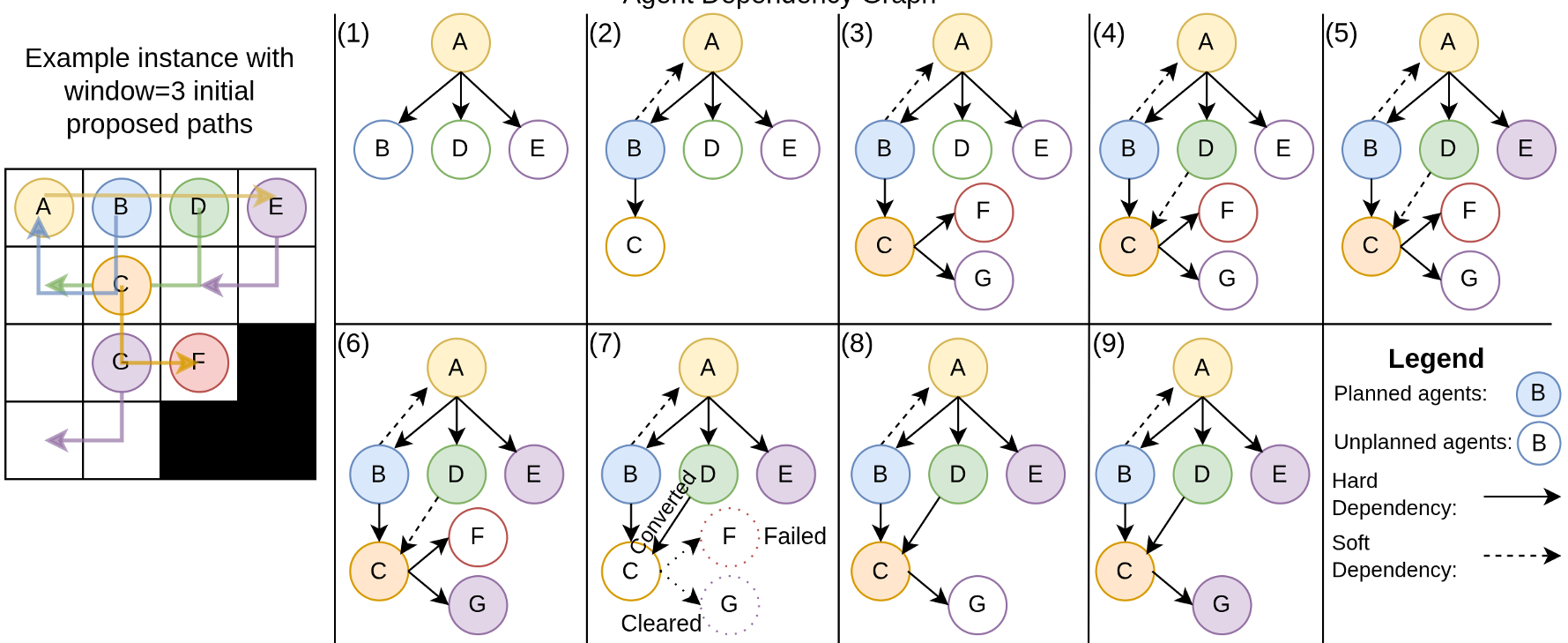 图 1:MD-PIBT 构建并搜索代理依赖图的过程。可以看到机器人 A 如何通过 AgDG 同时调动 B、D、E 进行避让。
图 1:MD-PIBT 构建并搜索代理依赖图的过程。可以看到机器人 A 如何通过 AgDG 同时调动 B、D、E 进行避让。
通过这个图结构,MD-PIBT 可以通过一个简单的参数 (最大允许碰撞数)来灵活控制规划强度。当 时,高优先级智能体被赋予了“推开”周围多个低优先级智能体的能力,这在拥挤环境中是破局的关键。
算法详解:带有回溯的递归规划
MD-PIBT 的执行流程如下:
- 初始化:根据距离目标点的远近分配初始优先级。
- 路径搜索:基于
findBestPath寻找候选路径。 - 依赖处理:一旦确定路径,立即更新 AgDG,并将受影响的节点加入规划队列。
- 灵活回溯:如果某个机器人(如上图中的 F)实在找不到路,它会请求其父节点(C)重新规划(Attempting-to-replan)或被迫退回安全位置(Falling-to-safe-path)。
实验与结果:大型机器人的救星
在 PMLA (Pebble Motion with Large Agents) 任务中,MD-PIBT 展现了压倒性的优势。
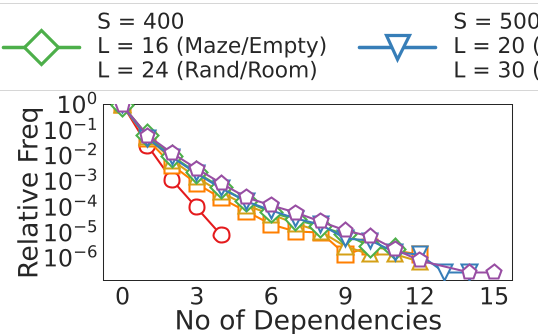 图 2:在 PMLA 场景下的成功率对比。MD-PIBT (C > 1) 的表现远超只允许单碰撞的 EPIBT。
图 2:在 PMLA 场景下的成功率对比。MD-PIBT (C > 1) 的表现远超只允许单碰撞的 EPIBT。
关键发现:
- 成功率大幅提升:在大尺寸机器人占据主要通道的场景下,增加 值能让大机器人在排开周围干扰时表现出更强的“决断力”。
- 运行时优化:令人意外的是,虽然处理的依赖变多了,但由于减少了无效的搜索尝试和冲突,MD-PIBT 在复杂场景下的实际运行时间有时反而比老算法更短。
- 万级扩展性:在模拟 10,000 个机器人的调度的 Lifelong MAPF 任务中,该框架依然能保持极其稳定的吞吐量。
总结与洞察
MD-PIBT 不仅仅是一个算法的改进,它提供了一个通用的 MAPF 协议层。
- 泛化性强:通过调整超参数 (窗口大小)、(重试限制)和 ,它可以模拟出从传统 PIBT 到最先进 EPIBT 的所有行为。
- 动力学友好:它不关心底层的单智能体搜索是如何实现的,这使得它能直接应用到包含旋转、加减速限制的真实机器人模型中。
未来,MD-PIBT 有望成为异构机器人集群(Heterogeneous Swarms)的标准避碰协议。正如作者所言,它很有潜力发展成类似于 CBS (Conflict-Based Search) 那样的领域基石工作。
局限性提示:尽管 MD-PIBT 表现优秀,但在处理具有极高约束的旋转动作(Rotation Motion)时,多依赖处理带来的收益会有所收敛,这提示我们在极度受限空间内,搜索模式(PIBT vs EPIBT)的选择依然至关重要。