本文提出了 RefracGS,一种基于 3D Gaussian Ray Tracing 的折射场景新视角合成(NVS)框架。通过耦合神经高度场(Neural Height Field)与折射感知的高斯光线追踪,实现了对波动水面及其下方场景的高精度建模与实时渲染(200 FPS)。
TL;DR
在观察水下场景时,波动的表面会像不规则的透镜一样,导致严重的视觉畸变。传统的 3D 建模方法往往因“直线传播”假设而失效。RefracGS 首次将 3D Gaussian Splatting (3DGS) 的渲染性能与严谨的物理折射模型结合,通过可微的高度场建模与高斯光线追踪,实现了对水下场景的高保真重建和 200 FPS 的实时渲染性能,训练速度更是前代 SOTA 的 15 倍。
痛点深挖:为什么水下重建这么难?
在空气中,光线是直的;但在水界处,光线会根据 Snell’s Law (斯涅尔定律) 发生折射。
- 非线性路径:标准渲染引擎(如 3DGS 的分块光栅化)无法直接处理弯曲的光路。
- 视角不一致性:由于水面波动,不同位置观察到的水下点位会发生非线性位移,普通模型会产生严重的模糊和“漂浮物”。
- 计算成本:先前的折射 NeRF 方法(如 NeRFrac)需要昂贵的体积采样,渲染一张图通常需要几秒甚至几分钟,完全无法达到工业级应用要求。
核心方法:高度场与光线追踪的交响乐
RefracGS 的核心在于解耦:将复杂的折射系统分为“水面几何”与“水下场景”两个模块共同优化。
1. 水面高度图 (Water Height Map)
作者没有使用粗糙的网格,而是使用 神经网络高度场 (Neural Height Field)。为了兼顾效率和精度,提出了递归细分追踪 (Recursive Subdivision Tracing):
- 初始代理:使用粗糙的 2D 三角网格开始。
- 递归求交:通过 MLP 查询高度并动态细分三角形,仅在光线可能穿过的区域进行精修。这种方法结合了网格的查询效率和神经场的连续性。
2. 折射感知高斯光线追踪
系统不再使用光栅化,而是采用了 3D Gaussian Ray Tracing。光线在水点 处根据局部法线 进行折射计算,随后进入水下追踪 3D Gaussian 粒子。
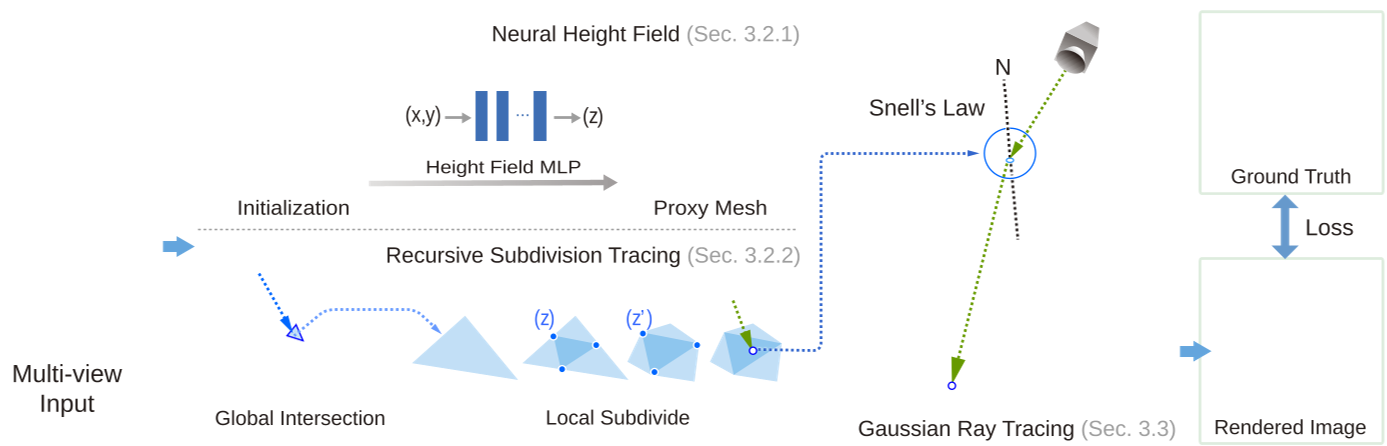 图 1:RefracGS 整体流程:从相机发射光线,与神经高度场求交,经折射后在 3D Gaussian 场中积累颜色。
图 1:RefracGS 整体流程:从相机发射光线,与神经高度场求交,经折射后在 3D Gaussian 场中积累颜色。
实验与结果:速度与精度的双重碾压
RefracGS 在多个维度上展现了统治力。在更具挑战性的多视角配置下(RefracGS 专用数据集),该方法成功恢复出了极具细节的水下纹理,而之前的 baseline 几乎全线崩溃。
- 重建精度:在自定义数据集上,水面重建 RMSE 低至 0.115cm,而之前的 SOTA 方法 NeRFrac 为 3.655cm。
- 渲染效率:支持 242 FPS 的 4090 实时渲染,达到了真正的“秒开”级体验。
- 训练耗时:从原先的数小时缩短至 11 分钟。
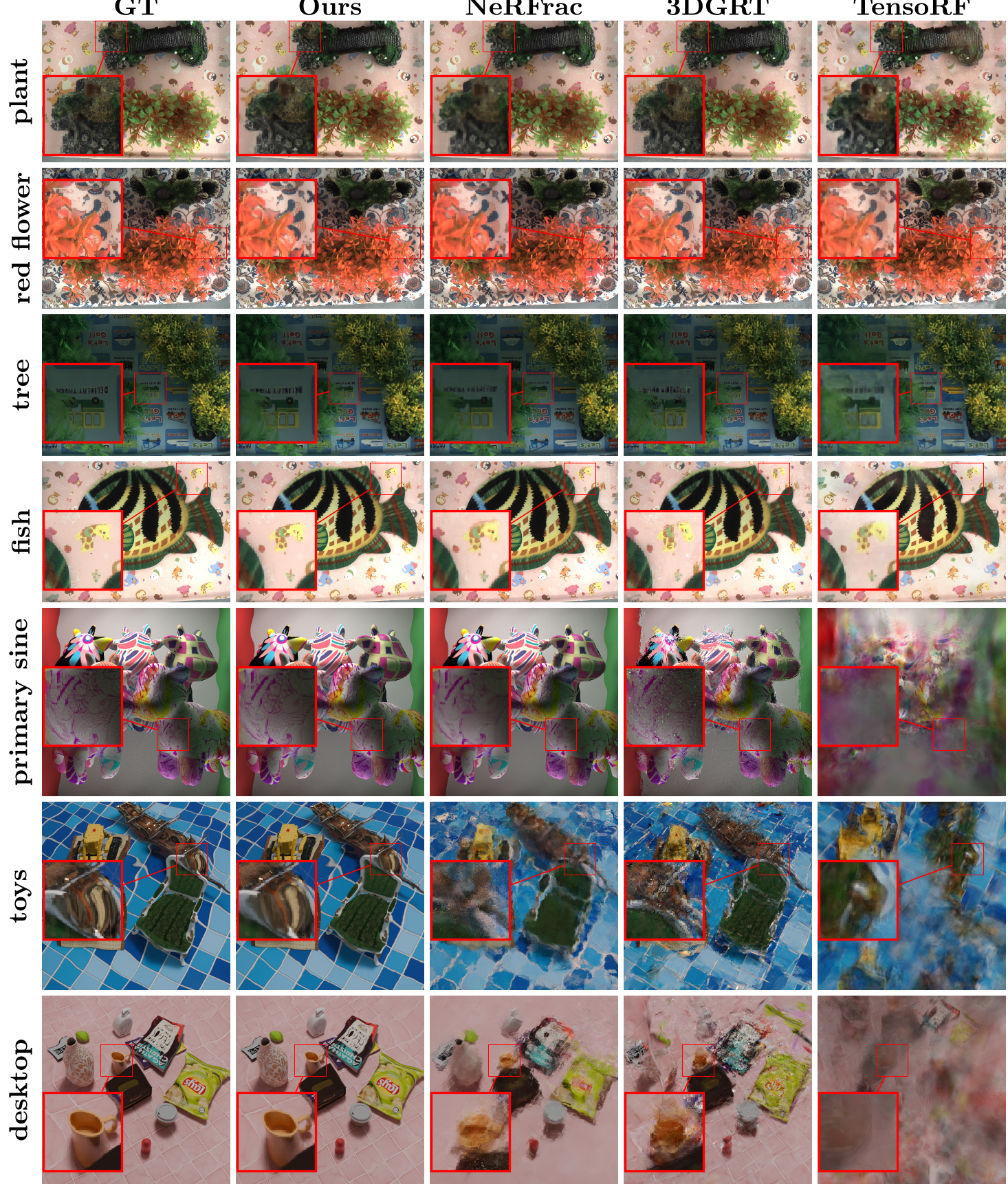 图 2:在复杂波浪下,RefracGS 准确捕获了高频细节,且水下物体几何完整。
图 2:在复杂波浪下,RefracGS 准确捕获了高频细节,且水下物体几何完整。
深度洞察:物理驱动的未来
RefracGS 的价值不仅在于刷榜。由于模型显式建模了水面,它赋予了系统天然的“后期编辑”能力:
- 一键去水 (Water Removal):训练完成后,关闭折射路径即可获得清晰的水下物体图,支持后续的测绘和几何提取。
- 水面编辑 (Water Surface Editing):可以在不重训的情况下,将静止水面替换为波浪水面。
局限性
目前 RefracGS 主要处理几何畸变,尚未深入建模复杂的辐射度效应(如水面的菲涅尔反射、水下体积散射和焦散效果)。此外,对于水下动态物体的建模仍是未来的挑战。
总结
RefracGS 巧妙地利用了 3DGS 的点云灵活性,通过引入可微的物理折射层,解决了 NVS 领域的一个硬核难题。它不仅证明了“物理常识”在 AI 时代依然关键,更为机器人水下导航和海洋生态监测提供了实用的工具。