本文提出了 QuatRoPE,一种专为 3D 场景理解设计的四元数旋转位置编码方法,旨在增强大语言模型(LLM)的 3D 空间推理能力。该方法在 ScanRefer 和 SQA3D 等多个基准测试中超越了现有 SOTA 模型,实现了高效且可扩展的物体间关系建模。
TL;DR
空间推理是具身智能的核心,但传统的 3D 大语言模型(3D LLMs)在性能与效率之间一直难以平衡。本文提出的 QuatRoPE 巧妙地利用四元数(Quaternions)对物体的 3D 坐标进行编码。它不仅将空间关系的计算复杂度从平方级降低到了线性 $O(n)$,更通过数学上的优雅推导,让 LLM 的注意力机制(Attention)自发地计算出物体间的相对方位。
空间推理的困境:坐标还是关系?
在 3D 视觉问答(VQA)或视觉定位(VG)任务中,模型必须理解“窗户左边的桌子”这种空间逻辑。
- 绝对坐标派:直接给模型输入 (x, y, z)。但 3D 场景的坐标原点是随机的,坐标值本身没有物理意义,模型很难从这些生硬的数字中学到“相对位置”。
- 显式关系派:把物体两两之间的关系都作为 Token 输入。这种方法虽准,但场景中一旦物体变多,输入长度会呈平方级($n^2$)爆炸。例如在某些数据集中,500个物体会产生 15 万条关系记录,直接撑爆 LLM 的上下文窗口。
QuatRoPE 的直觉: 能不能只给模型 $n$ 个坐标 Token,但在计算过程中让它自动产生 $n^2$ 的关系感受野?
核心方法:QuatRoPE 与 IGRE
1. 四元数旋转:将坐标转化为“夹角”
QuatRoPE 的核心在于利用四元数旋转(Quaternion Rotations)。它将 Query ($q$) 和 Key ($k$) 向量视为纯四元数,并根据物体的 3D 坐标进行旋转变换。
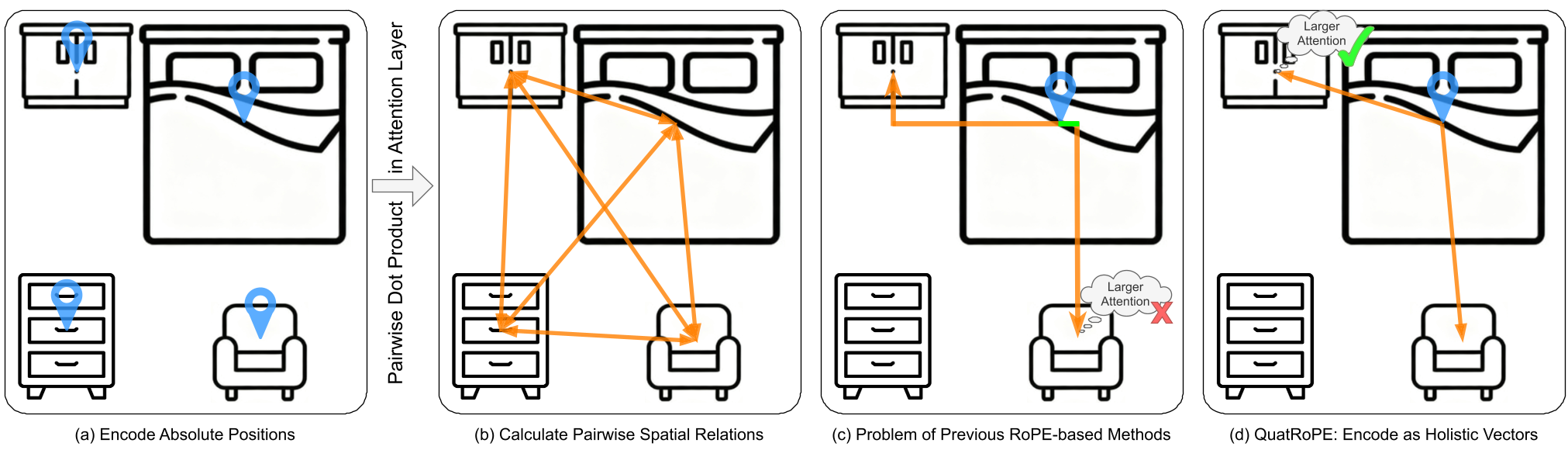
在 Transformer 的注意力层中,Query 和 Key 的点积决定了权重。QuatRoPE 通过数学推导证明(见论文公式 1-5),经过旋转后的点积结果仅取决于两个物体之间的相对位置差($\vec{m} - \vec{n}$)。
此外,QuatRoPE 采用整体向量编码(Holistic Encoding)。传统的 RoPE 分轴处理坐标,容易在某一轴坐标相近时产生错误的短路关联。QuatRoPE 将三维坐标视为统一整体,有效避免了这种“伪近邻”偏差。
2. IGRE 机制:互不干扰的“专家通道”
将 3D 空间编码注入 LLM 时,最怕扰乱模型原本的语言逻辑。作者设计了 Isolated Gated RoPE Extension (IGRE):
- 维度隔离:为空间编码保留专属维度,不与文本的语言 RoPE 混用。
- 门控机制:只有当两个 Token 都是“物体 Token”时,空间旋转才会生效。对于文本或系统指令,补零处理,确保 LLM 依然能流畅地“说人话”。
实验战绩
研究团队在 ASR (Attribute-free Spatial Reasoning) 这一苛刻的基准上进行了测试。该基准剔除了颜色、形状等视觉提示,强迫模型只能靠空间方位(如“在...之后”、“靠近...”)来寻找目标。
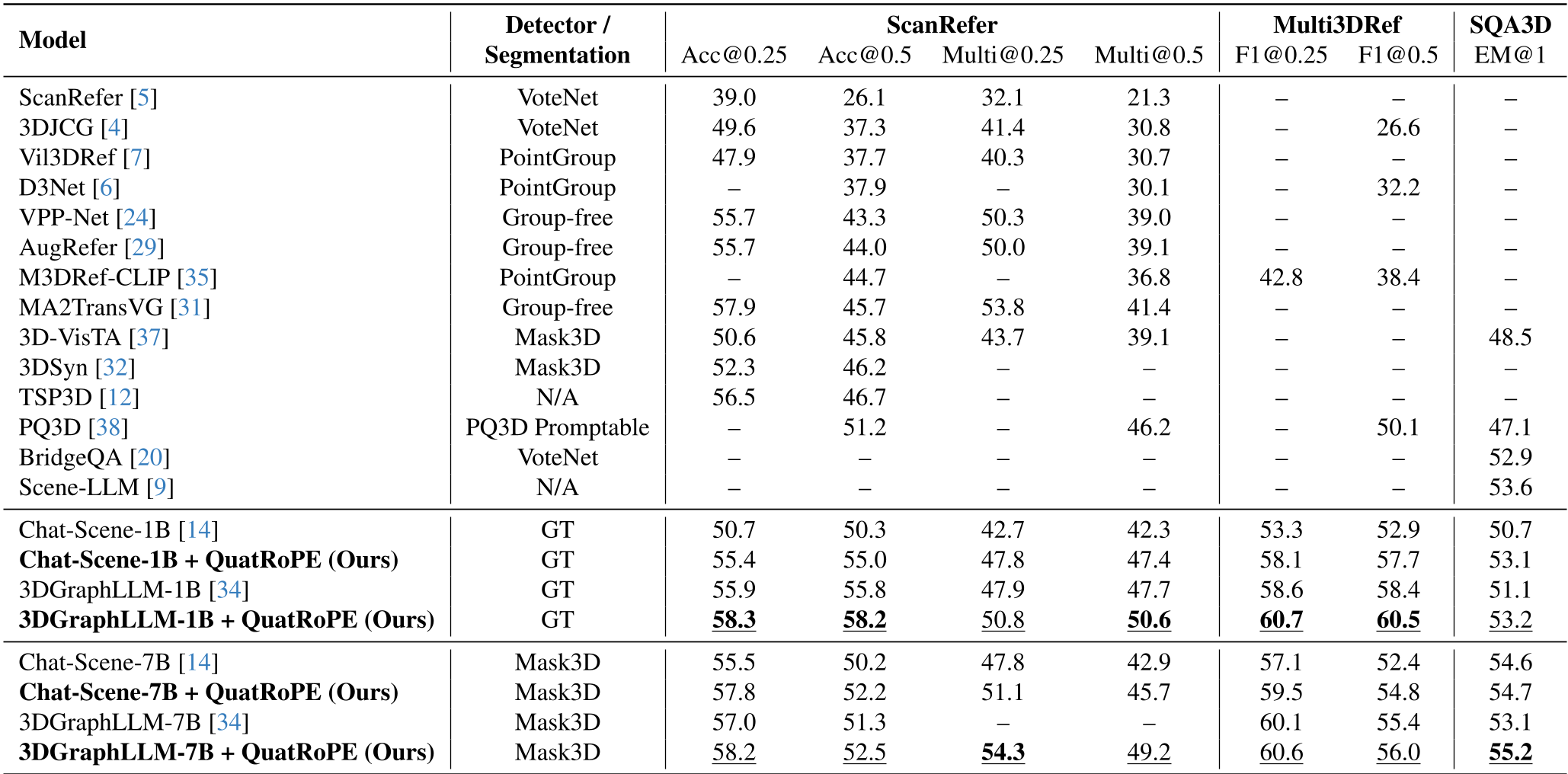
结果显示,QuatRoPE 在各种尺度(1B, 7/8B)下均表现出色:
- 在 ScanRefer 任务中,相比基线模型,准确率显著提升。
- 在处理单轴相近但空间遥远的极端案例时($\delta=0.05$ 严重情况),QuatRoPE 的领先优势扩大到了 7.69%,证明了其整体编码的鲁棒性。
深度总结:为什么 QuatRoPE 值得关注?
QuatRoPE 的成功标志着 3D 场景建模从“暴力堆砌数据”转向“数学逻辑注入”。它不仅仅是一个位置编码的变体,更提供了两个关键洞察:
- Inductive Bias 的力量:通过四元数旋转矩阵,我们预先为模型注入了“平移不变性”的物理定律,从而降低了训练难度。
- 线性扩展性:它解决了 3D 场景复杂度与 LLM 上下文限制之间的固有矛盾。
局限性:目前的旋转频率(Frequency)仍需手动设定,未来如何让模型自适应调整旋转幅度以应对不同尺度的房间,将是一个有趣的课题。
作者观点:QuatRoPE 将 3D 坐标编码从“数字描述”升华为“几何操作”,是极简主义技术在多模态领域的一次优雅实践。