本文推出了 T-800,一种支持 800 Hz 高采样率的全手部动作捕捉数据手套系统。该系统通过 18 个分布式 IMU 节点和创新的硬件架构,实现了对人类手部高频动作动态(>100 Hz)的精确记录,在采样频率和时间同步方面显著超越了现有的 SOTA 方法。
TL;DR
在具身智能(Embodied AI)飞速发展的今天,机器人灵巧手(Dexterous Hand)的控制瓶颈往往不在于硬件,而在于高质量示范数据的缺失。本文提出的 T-800 数据手套 以惊人的 800 Hz 采样率,配合创新的硬件广播同步技术,首次揭示了人类在进行转笔、接球等复杂动作时,存在大量 100 Hz 以上的高频动力学信息。这一发现不仅打破了传统 200 Hz 动捕系统的采样天花板,还为训练高鲁棒性的机器人操作策略铺平了道路。
背景定位:为什么现有的动捕手套“不够快”?
要让机器人像人手一样灵巧,我们需要捕捉人手在接触物体瞬间的微小调整。然而,现有的技术方案始终处于“两难境地”:
- 光学动捕(如 Vicon):虽然频率高,但在手部抓取物体时,手指常被物体或手掌遮挡,导致坐标丢失。
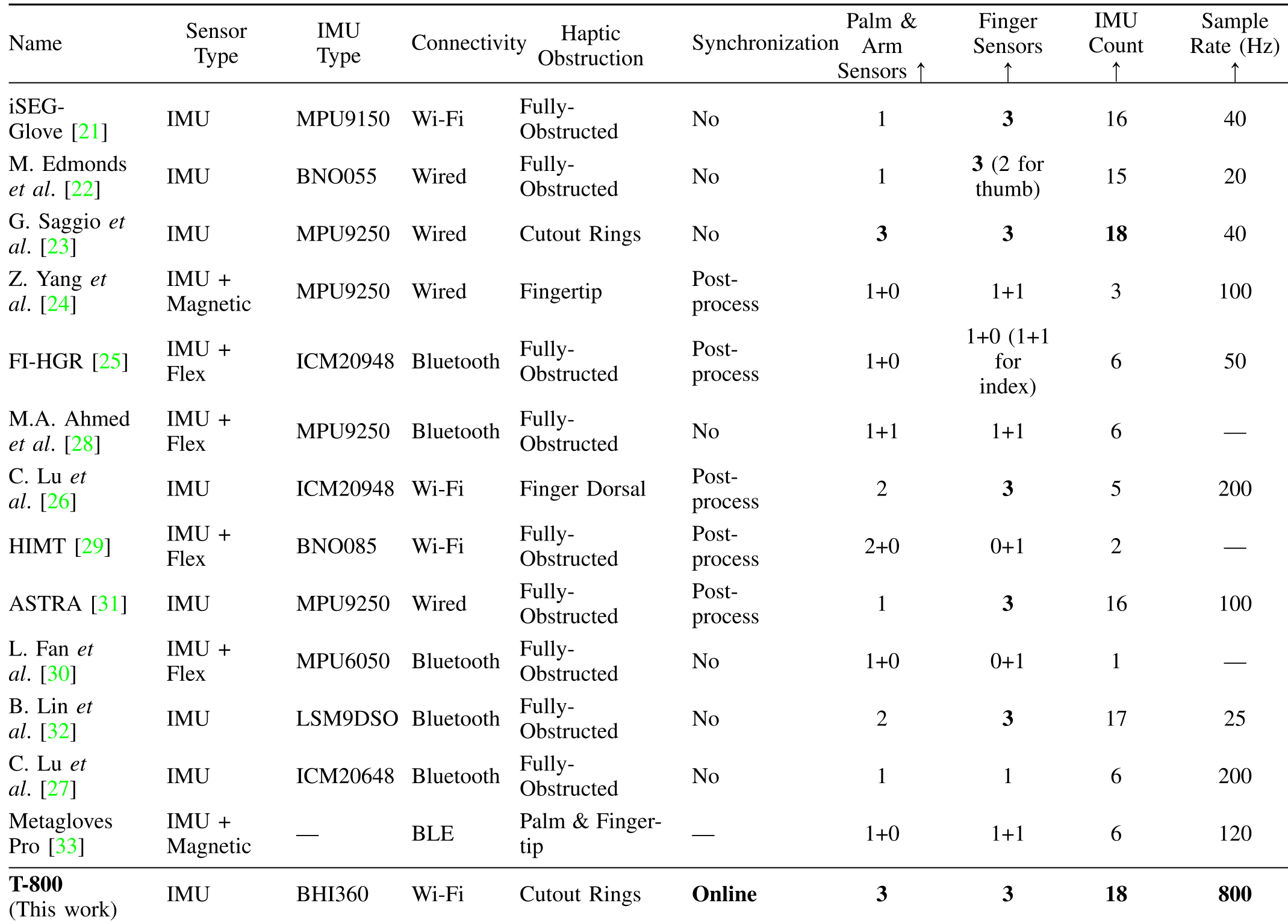
- 传统 IMU 手套:虽然无遮挡,但采样率普遍在 50-200 Hz 之间。根据 Nyquist 采样定律,这些设备最多只能还原 100 Hz 以下的运动轨迹。更严重的是,分布式传感器由于时钟漂移(Clock Drift),长时间记录后各手指的数据会出现时间轴上的步调不一,产生运动学上的“幻觉”。
核心技术:T-800 的“高频三板斧”
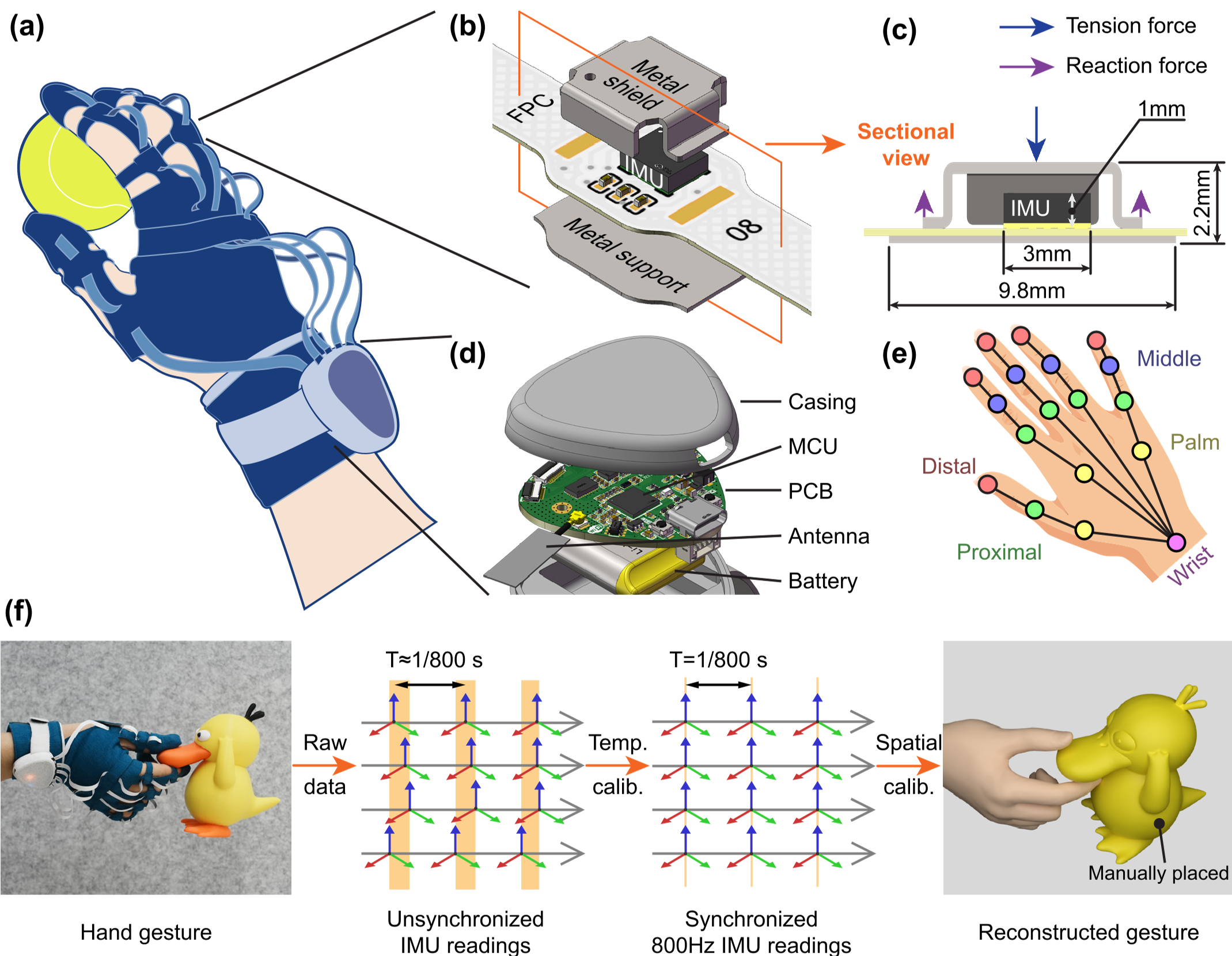
1. “三明治”机械隔离结构 (Mechanical Stress Isolation)
在剧烈运动中,皮肤的变形和织物的滑动会导致 IMU 传感器与骨骼发生相对位移。T-800 采用了定制的金属顶屏蔽层和底支撑板,形成了一个刚性的“外骨骼”封装。
- 物理直觉:这种结构将织物的拉力绕过了传感器中心,直接传递给指骨,确保传感器在高速震动下依然能实现非滑动耦合(Non-slip coupling)。
2. 基于硬件广播的同步协议 (Broadcast-based Sync)
由于每个 IMU 都有独立的晶振,随时间推移必然产生毫秒级的误差。T-800 在微控制器(MCU)层面利用 I/O 矩阵实现了硬件级广播。
- 实现方式:MCU 同时刻向所有 18 个节点发送一个“时间戳锁存”指令。这就像是比赛现场的同步发令枪,让所有传感器在同一绝对时刻对齐自己的本地时钟,从而实现了真正意义上的 Online 同步。
实验发现:那些被“抹平”的高频信号
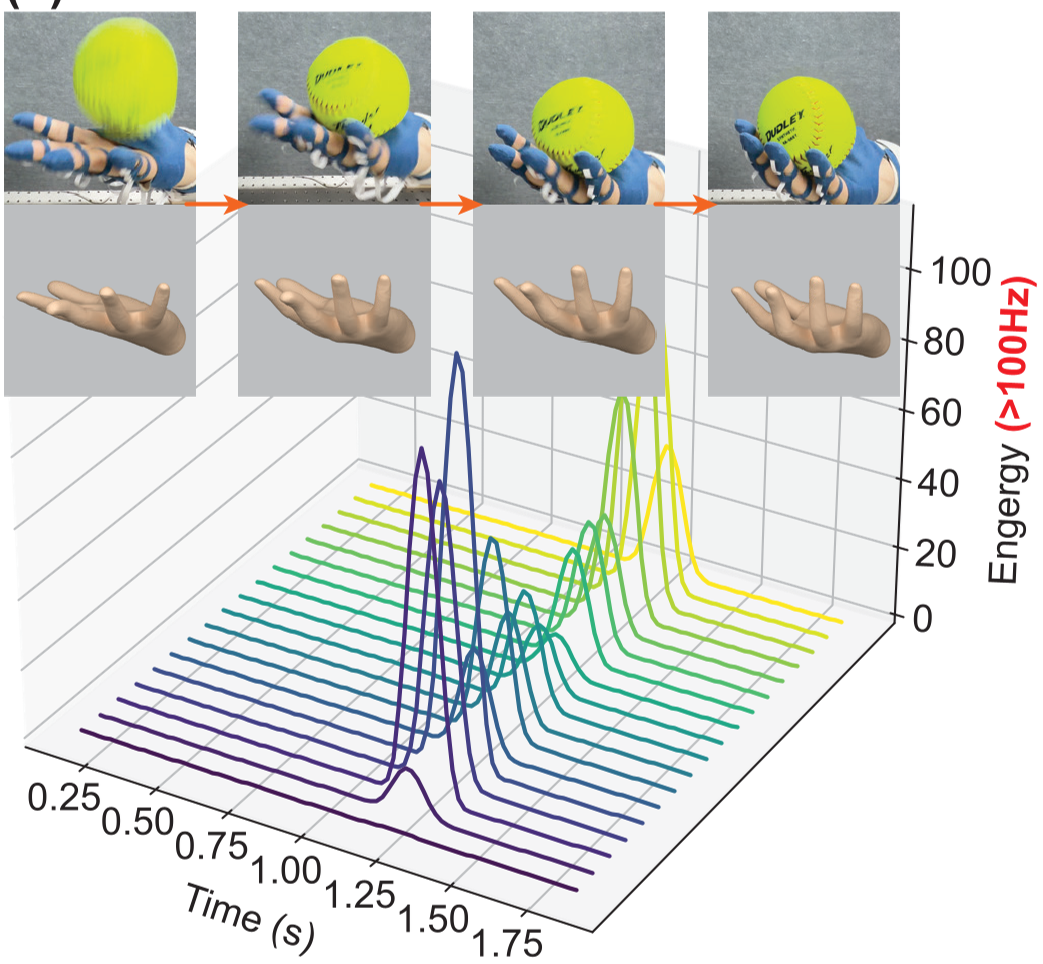
通过对转笔(Pen Spinning)和接球动作的频谱分析,T-800 团队获得了一个令学术界振奋的发现:
- 高频能量场:在 100 Hz 以上的频段中,存在着极高的能量密度,特别是在指尖拨动笔尖的瞬间。
- 选择性激活:在只动手指不动大拇指的实验中,T-800 精准地捕捉到了其余四指的高频脉冲,而拇指传感器保持静默。这证明采集到的高频信号是真实的生物力学特征,而非系统噪声。
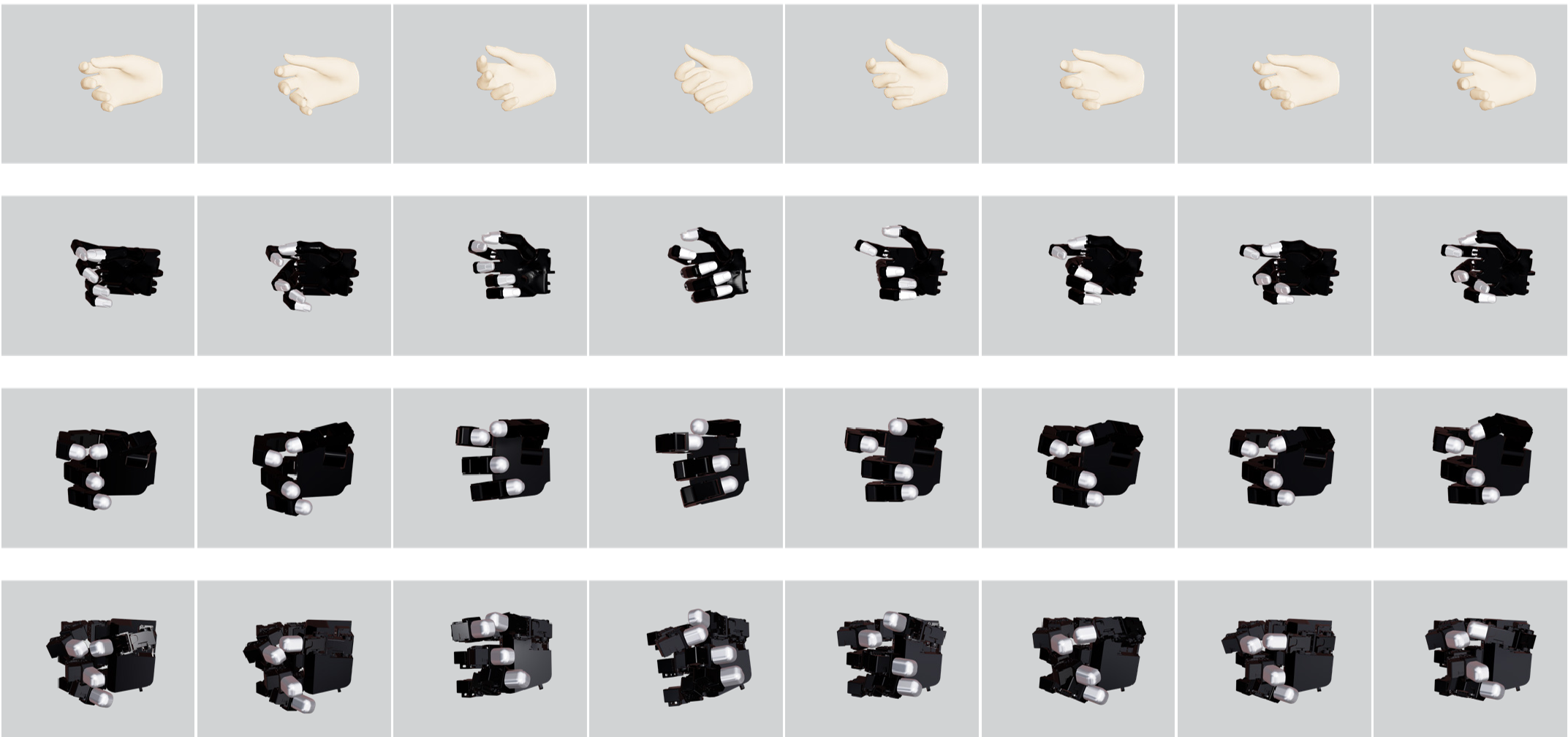
运动学重映射 (Kinematic Retargeting)
为了验证数据的可用性,研究者将采集的高频信号映射到了三种主流机器人灵巧手上(Shadow Hand, Allegro Hand, Leap Hand)。
- 结果分析:实验显示,即使是对于非类人结构的 Allegro Hand,重映射误差也能控制在 1.0 mm 左右。这意味着 T-800 提供的数据具有极高的运动学兼容性,可以直接用于控制算法的闭环训练。
资深主编点评:开启具身智能的“超分”时代
T-800 不仅仅是一个更高采样率的硬件设备,它更像是为手部动捕领域引入了“超分辨率”的概念。
- 学术贡献:它不仅解决了工程上的同步难题,更通过严谨的频谱实验,从底层质疑了过去 20 年间低频动捕数据的完整性。
- 局限与展望:虽然 T-800 解决了“动”的问题,但目前尚未集成稠密的触觉阵列(Tactile Sensing)。如果未来能实现 800 Hz 的运动数据与高分辨率触觉反馈的深度耦合,我们将真正复刻出人类手部的感知-动作回路(Sensorimotor Loop)。
对于正在寻找高性能遥操作或模仿学习底层平台的开发者来说,T-800 的设计思路无疑是目前该领域的“金标准”。