本文提出了一个基于认知架构理论(CAT)的统一世界模型(World Models)框架,旨在将人类认知的七大功能(记忆、感知、语言、推理、想象、动机和元认知)整合进 AI 模型。报告系统梳理了视频生成、具身智能和新提出的“认识论世界模型”(Epistemic World Models)三大领域,定义了迈向“类人”机器认知的技术路线图。
TL;DR
来自东北大学 Physical AI 研究中心(PAIR)的深度报告提出:真正的“类人” AI 必须补全认知版图。本文基于认知架构理论 (Cognitive Architecture Theory, CAT),将世界模型(World Models)从简单的“模拟器”升华为包含“动机”与“元认知”的统一实体,并首次定义了认识论世界模型 (Epistemic World Models),为科学发现提供了自动化新范式。
1. 痛点:被误读的“拟人化”
在 Sora 或 Llama 惊艳世界后,研究界频繁使用“类人”、“物理直觉”等词汇描述模型。然而,资深主编必须指出:现有的模型在认知坐标系上是严重残缺的。
大多数研究只在感知(如视频编码)和推理(如预测下一帧)上卷精度,而缺乏真正的自省能力。
- 由于缺乏动机(Motivation):代理只能被动跟随人类定义的 Reward Function,无法像人类一样产生“好奇心”去自主建模未知的世界。
- 由于缺乏元认知(Meta-cognition):模型在发生物理错误或逻辑幻觉时,并不知道自己“错了”,缺乏自我监控和修正的闭环。
2. 核心架构:认知功能的七位一体
作者提出的统一世界模型框架包含以下核心要素:
- 感知 (Perception):多模态输入(视觉、语言、激光雷达)的特征化。
- 记忆 (Memory):通过 Latent State-Space 保持时间相干性(如 V-JEPA 架构)。
- 语言 (Language):作为符号推理的核心 interface。
- 推理 (Reasoning):预测状态转移 。
- 想象 (Imagination):即“梦境训练”(Dreaming),在潜在空间进行假设性的 Rollout。
- 动机 (Motivation):引入 主动推理 (Active Inference),让模型为了减少“不可预见性”而主动探索。
- 元认知 (Meta-cognition):通过 全局工作空间 (Global Workspace) 动态路由信息,实现自我评价。
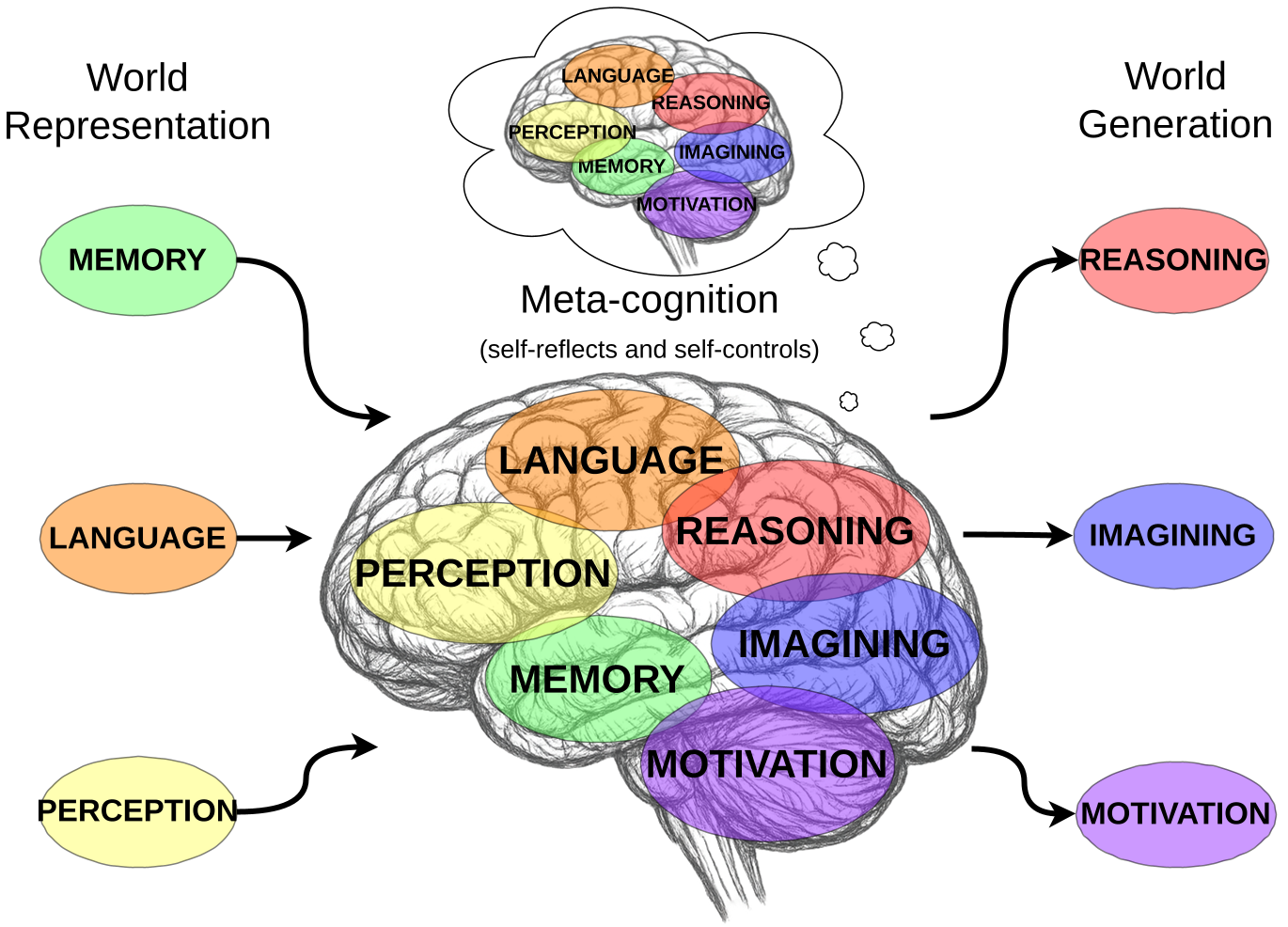 上图展示了 CAT 理论如何指导世界模型的模块化设计,区分了世界表示与世界生成的职责边界。
上图展示了 CAT 理论如何指导世界模型的模块化设计,区分了世界表示与世界生成的职责边界。
3. 技术深度:从视频仿真到具身智能
视频世界模型 (Video WMs)
当前的难点在于长时程一致性 (Long-horizon Consistency)。论文对比了 Autoregressive (如 Sora) 与 Diffusion (如 Cosmos) 路径,指出通过注入旋转位置编码 (ViewRope) 或 3D 高斯泼溅 (3DGS),模型开始能真正“理解”几何约束。
具身世界模型 (Embodied WMs)
具身智能不仅要看,还要动。
- PointWorld:通过预测 3D 点云流,保证了跨机器人的泛化能力。
- FlowDreamer:利用光流作为物理反馈信号,确保“想象”出的轨迹是可执行的。
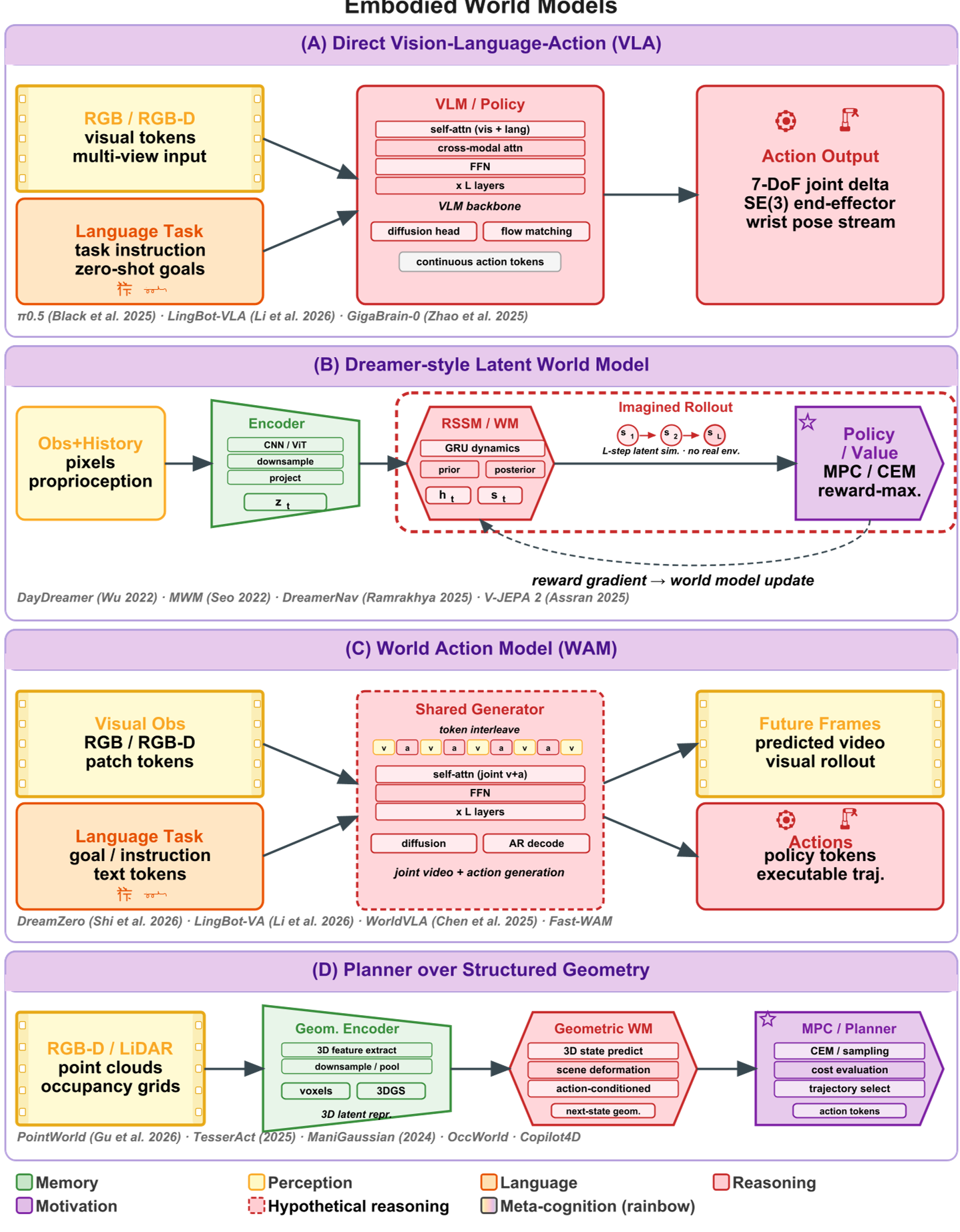 具身模型需在潜空间中耦合动作 () 与状态转移 (),核心在于物理真实性而非像素美观度。
具身模型需在潜空间中耦合动作 () 与状态转移 (),核心在于物理真实性而非像素美观度。
4. 突破点:认识论世界模型 (Epistemic World Models)
这是本文最具前瞻性的贡献。作者认为,科学知识本身就是一个“世界”。 在进行药物研发或材料科学发现时,模型不是在像素空间游走,而是在结构化知识空间演化。
- Global Workspace(全局工作空间):扮演了中枢角色,各个 Agent(如检索专家、假设专家、实验专家)在工作空间广播信息,通过 SOAR (State-Operator-Result) 循环不断更新科学认知状态。
- 意义:这为实现机器的元认知提供了载体。通过外部化的执行轨迹(Chat History 或文档空间),代理可以观察、评估并重写自己的推理逻辑。
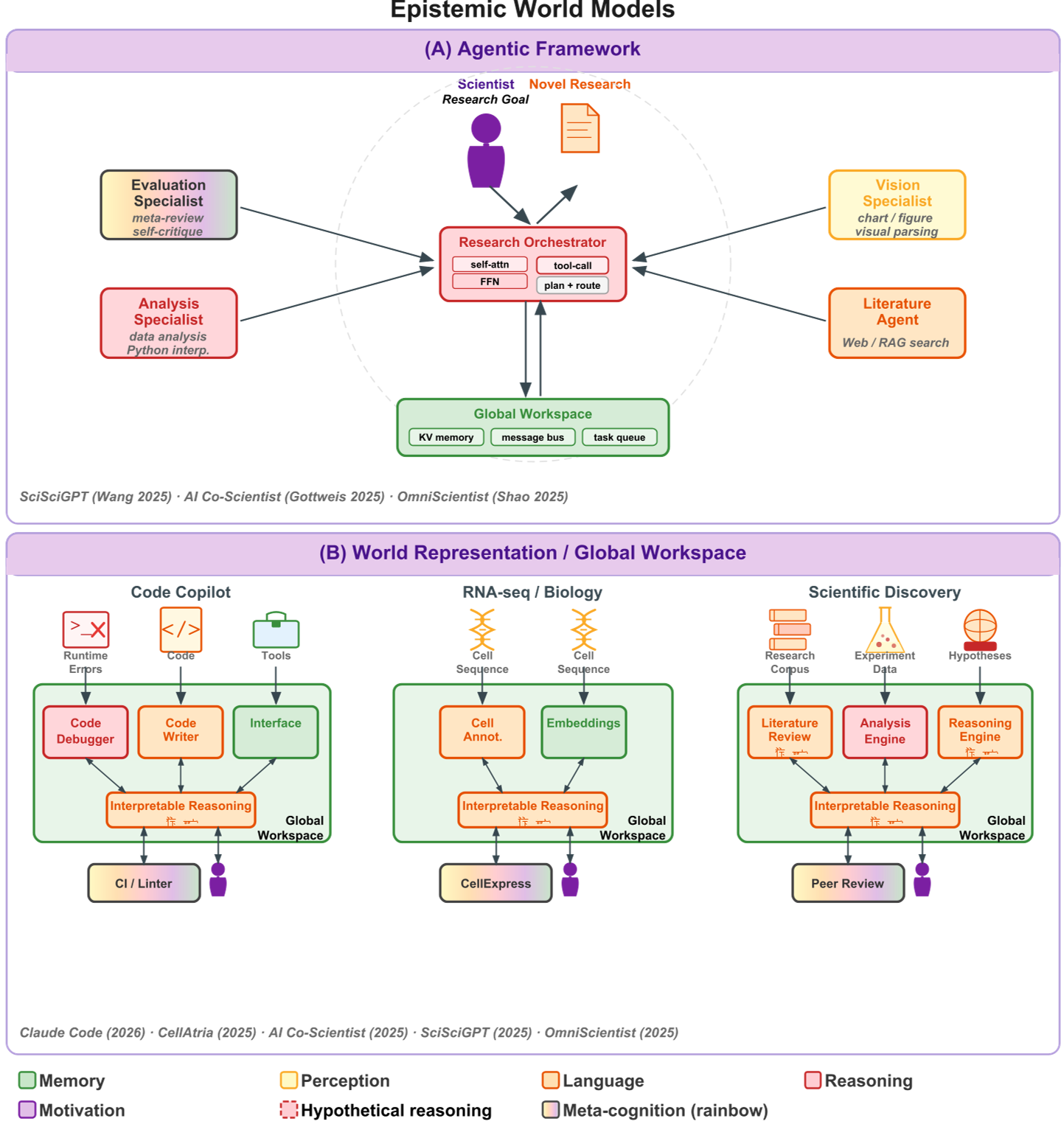 认识论模型通过全局工作空间将人类专家与 AI 协作闭环。
认识论模型通过全局工作空间将人类专家与 AI 协作闭环。
5. 总结与展望
本文不仅是一篇综述,更是一份技术宪章。它揭示了迈向 AGI 的路径:
- 强化内在动机:放弃手工设计的繁杂 Reward,拥抱最小化自由能原则。
- 元认知闭环:利用像 Soar 或混合专家模型(MoE)的路由机制实现自我纠错。
正如作者所言,语言不只是文本填充,它是人类共享意图的工具。未来的世界模型将不再只是视频生成器,而是具备自驱力、能与人类并肩进行科学探索的数字认知实体。
关键词:World Models, Cognitive Architecture, Active Inference, Epistemic AI, Physical AI.