本文提出了 RoboForge,一个端到端的类人机器人全身运动控制框架,通过 Physical Plausibility Optimization (PP-Opt) 模块实现了文本到运动潜空间(Latent Space)的物理优化生成与控制。在 Unitree G1 机器人上验证了其无需显式重定向(Retarget-free)即可实现高稳定性、低跟踪误差的复杂运动逻辑。
TL;DR
在类人机器人领域,让机器人听懂指令并“优雅地动起来”一直面临物理可行性的天堑。南洋理工等团队提出的 RoboForge 放弃了传统的“生成后重定向”模式,转而构建了一个潜空间驱动的闭环优化体系。通过引入 PP-Opt 模块,该框架不仅能消除足部滑动、地面穿透等物理违和感,更在 Unitree G1 机器人上实现了 SOTA 级别的全身运动跟踪性能。
背景定位:由于物理缺失导致的“幻觉”运动
目前的扩散模型(Diffusion Models)生成的动作在视频里看起来很美,但如果直接灌给机器人,机器人会立刻因为重心不稳或接触逻辑错误而倒下。核心矛盾在于:
- Retargeting 损耗:从人类 MoCap 数据到机器人关节空间的映射会产生误差累积。
- 接触动力学不连续:视觉模型倾向于平滑轨迹,而物理世界需要离散、精准的冲量交换。
核心机制:PP-Opt 双向桥接模块
RoboForge 的卓越之处在于它不把“生成”和“控制”看作孤立的两个步骤,而是通过 PP-Opt (Physical Plausibility Optimization) 建立了一个自进化的循环。
1. 正向:物理感知的策略细化
系统利用物理仿真器作为“教练”,对跟踪策略(Tracker)进行强化学习。它通过以下三个特定的物理惩罚项来纠正动作:
- Skating (足部滑动):惩罚支撑足与地面的相对位移。
- Floating (悬空):惩罚预定接触点未落地的行为。
- Penetration (地面穿透):严禁肢体进入地面几何体。
2. 反向:潜空间数据回流 (Backward Fine-tune)
这是本文最具启发性的设计。系统将仿真器中运行成功的、经过物理矫正的动作数据提取出来,反向微调(Fine-tune)前端的运动生成器(Motion Generator)。这意味着生成器在不断进化的过程中,会学会只在物理可行的潜空间区域内进行采样。
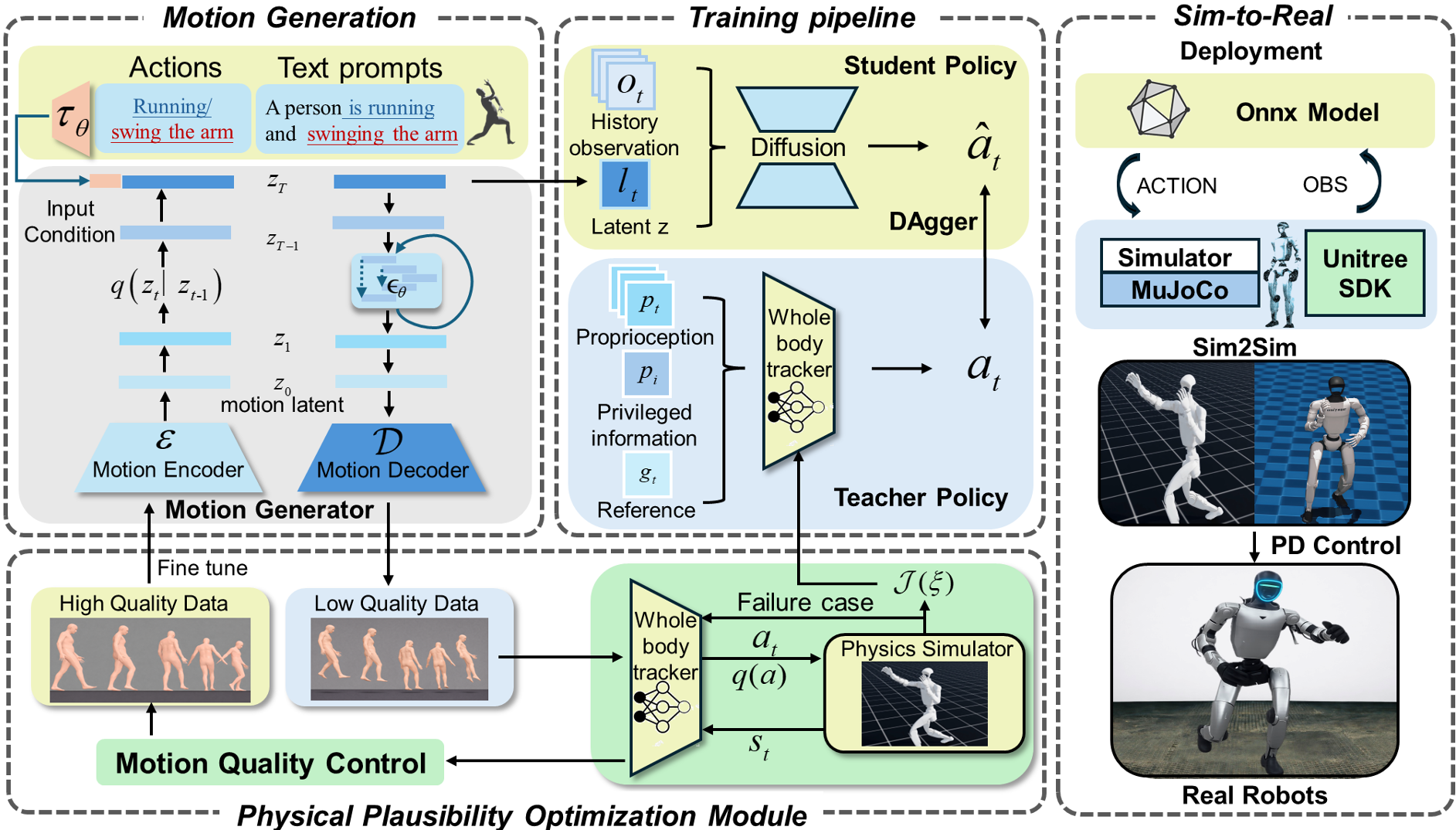 图 1:RoboForge 全栈架构图,展示了从文本编码到物理仿真的双向链路。
图 1:RoboForge 全栈架构图,展示了从文本编码到物理仿真的双向链路。
实验战绩:精度与稳定性的双重飞跃
物理指标的质变
在对 MLD 模型进行 PP-Opt 优化后,实验数据显示出了惊人的改进:
- 地面穿透率:从初始的 0.042 直接降至 0。
- FID (分布相似度):从 0.484 降至 0.454,证明优化后的动作更接近真实物理分布。
- 跟踪成功率:在 MuJoCo 环境中提升了 8 个百分点。
 表 1:运动生成质量与物理指标对比,PP-Opt 在保持多样性的同时大幅降低了错误率。
表 1:运动生成质量与物理指标对比,PP-Opt 在保持多样性的同时大幅降低了错误率。
隐式潜空间驱动 vs 显式重定向
RoboForge 采用的 Implicit Latent-driven 方案彻底干掉了中间的重定向步骤。对比实验显示,这种方案在跟踪误差(Empjpe)上不到传统方案(Ours-Explicit)的一半,尤其在接触转换剧烈的动作中表现稳健。
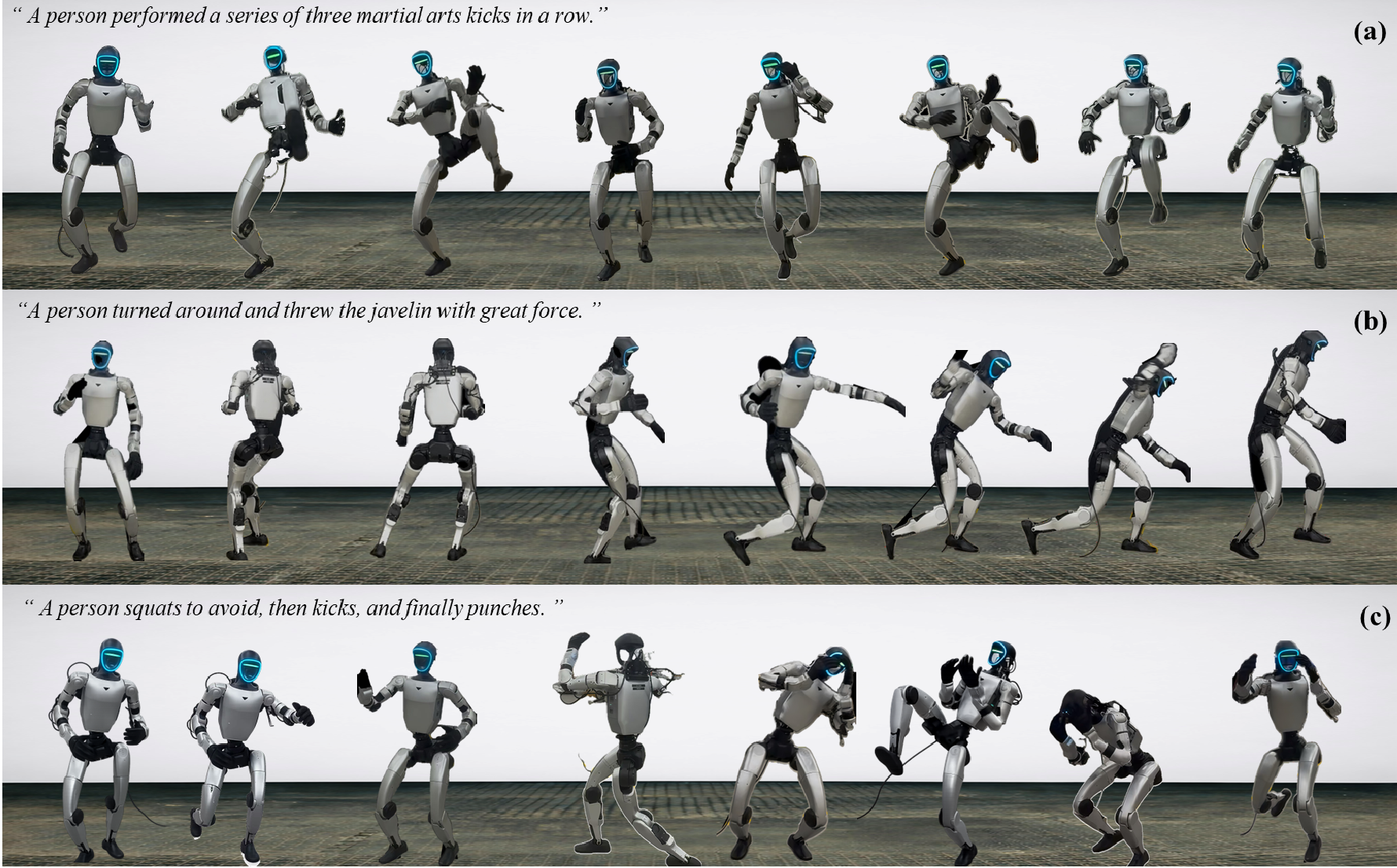 图 2:Unitree G1 机器人执行复杂指令:武术踢腿、标枪投掷、下蹲避让。
图 2:Unitree G1 机器人执行复杂指令:武术踢腿、标枪投掷、下蹲避让。
总结与洞察:走向“可部署”的具身智能
RoboForge 的成功证明了:
- 闭环胜过开环:单纯依靠海量数据训练的生成模型无法自发产生物理约束,必须引入仿真反馈。
- 潜空间是关键:直接在 Latent 层面进行控制(而非显式关节角)能赋予策略更高的容错率。
局限性:目前该框架主要针对平坦地面。对于复杂非结构地形(阶梯、碎石),如何实时更新潜空间的物理边界将是下一个研究高地。
Takeaway:未来的机器人将不再是“笨拙的模仿者”,而是具备物理直觉的“思考者”。RoboForge 迈出了坚实的一步。