本文推出了 MuscleMimic,一个开源的具身智能(Embodied AI)框架,旨在实现大规模肌肉驱动的人体肌肉骨骼模型(MSK)运动模仿学习。通过集成 GPU 加速的 MuJoCo Warp 仿真,该框架支持包含 416 个肌肉执行器的全模型训练,在保持生物力学真实性的同时,实现了比传统 CPU 方法快一个数量级的训练速度。
TL;DR
传统的 AI 角色动画往往依靠简化的扭矩驱动(Torque-driven),而忽略了人体真实的“发动机”——肌肉。EPFL 联合 NVIDIA、McGill 等机构开发的 MuscleMimic 框架,通过 GPU 并行加速,第一次让拥有 416 条肌肉的复杂人体模型在几天内就能学会上百种人类动作(从基础行走到着火地跳踢),并实现了与临床肌电(EMG)高度相关的生物力学仿真。
痛点深挖:为什么“带肉”的仿真这么难?
在具身智能研究中,我们虽然有 MuJoCo 和 Isaac Gym 这样的神兵利器,但大多数研究者仍选择将关节简化为“电机”。
- 维度爆炸:一个全身体模型拥有数百条肌肉,其动作空间(Action Space)远超传统的扭矩模型。
- 计算鸿沟:肌肉的 Hill-type 模型涉及复杂的非线性动力学和延迟特性,传统 CPU 仿真慢如蜗牛,训练一个通用策略动辄需要数月。
- 验证缺失:现有的肌肉模型大多是针对特定任务(如康复行走)设计的,缺乏能在多样动态运动中保持一致性的开源全身体模型。
核心贡献:MuscleMimic 的三驾马车
1. 物理真实且经过验证的模型
MuscleMimic 推出了两个 SOTA 级别的 Embodiments:
- MyoBimanualArm:固定根部的高精度上肢模型(126 条肌肉),专注于双臂协作与精细操作。
- MyoFullBody:拥有 416 条肌肉的全解析全身体模型,涵盖了从脚趾到手指的所有关键运动链。
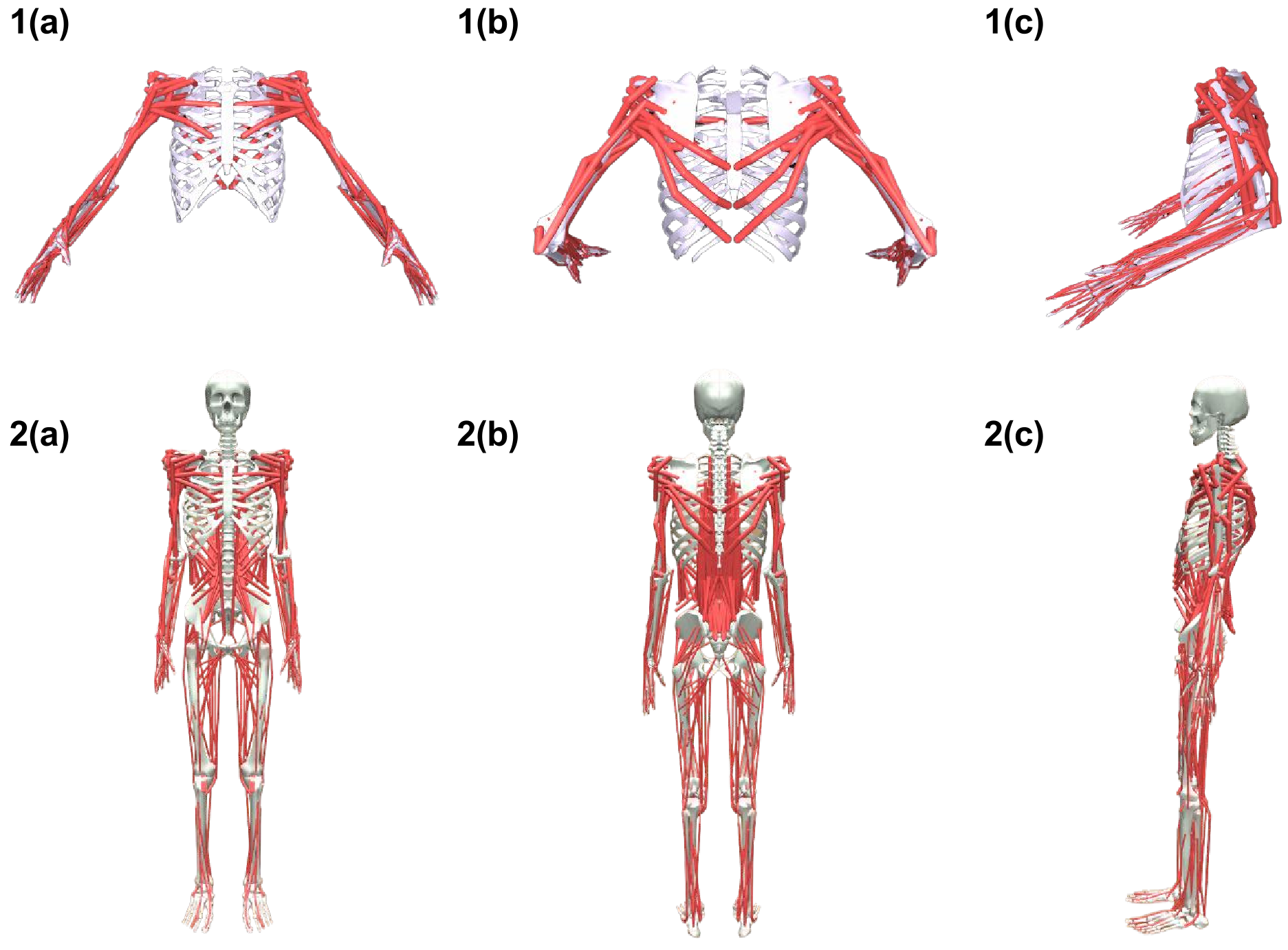 图 1:MyoBimanualArm(上)与 MyoFullBody(下)的正、背、侧视图。其几何碰撞体定义了真实的人体物理边界。
图 1:MyoBimanualArm(上)与 MyoFullBody(下)的正、背、侧视图。其几何碰撞体定义了真实的人体物理边界。
2. GMR-Fit 重定向管线
由于动捕数据(如 AMASS 数据集)通常基于 SMPL 这种纯视觉驱动的模型,它们与具有生物力学约束的肌肉骨骼模型之间存在“动力学鸿沟”。作者设计了 GMR-Fit,通过逆运动学和骨骼比例匹配,不仅修正了脚部穿模和漂移,还确保了重定向后的动作符合肌肉的最大力-长度(FL)曲线。
3. 大规模并行仿真与优化策略
借力 MuJoCo Warp,MuscleMimic 在 H100 上实现了惊人的并行效率。作者在消融实验中发现了一个有趣的洞察:在处理 MSK 模型时,传统的 PPO 设置(E=3 或 E=10)会导致 KL 散度急剧膨胀。这是因为肌肉激活量的延迟非线性放大效应使得 Off-policy 偏移极其严峻。因此,作者推荐使用 Single-epoch (E=1) 更新,虽然初始学习慢,但渐进性能最稳。
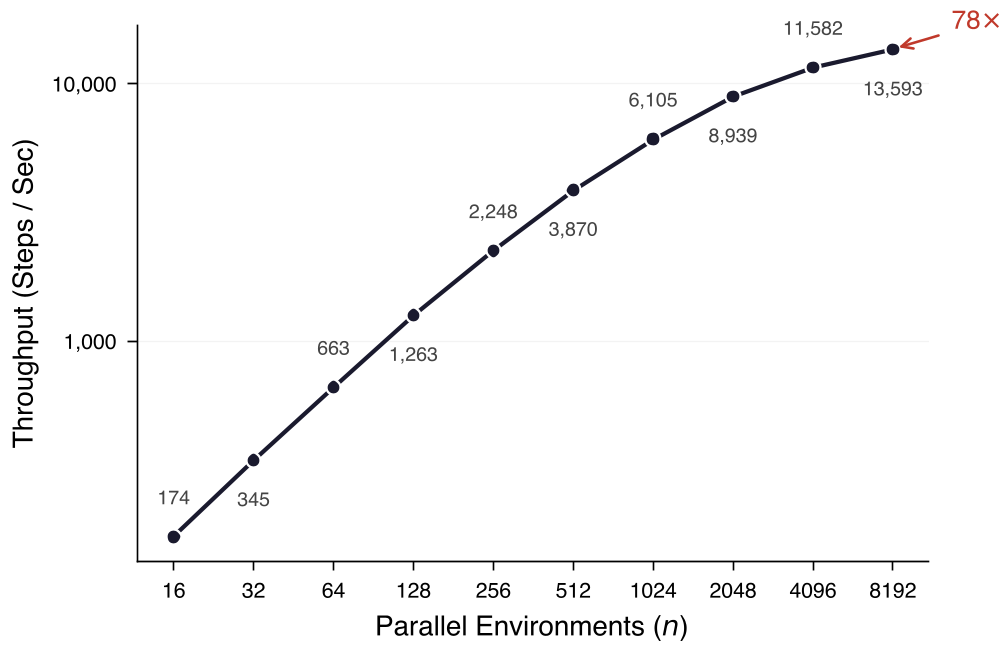 图 2:随着并行环境数 (n) 的增加,SPS(每秒步数)接近线性增长,展示了超强的可扩展性。
图 2:随着并行环境数 (n) 的增加,SPS(每秒步数)接近线性增长,展示了超强的可扩展性。
实验与结果:从行走到了不起的特技动作
在该框架下训练的 Generalist Policy(通用策略)表现优异。在 KINESIS 数据集上,步行和跑步的运动学轨迹与真实人体实验数据(Human Ground Truth)高度重合。
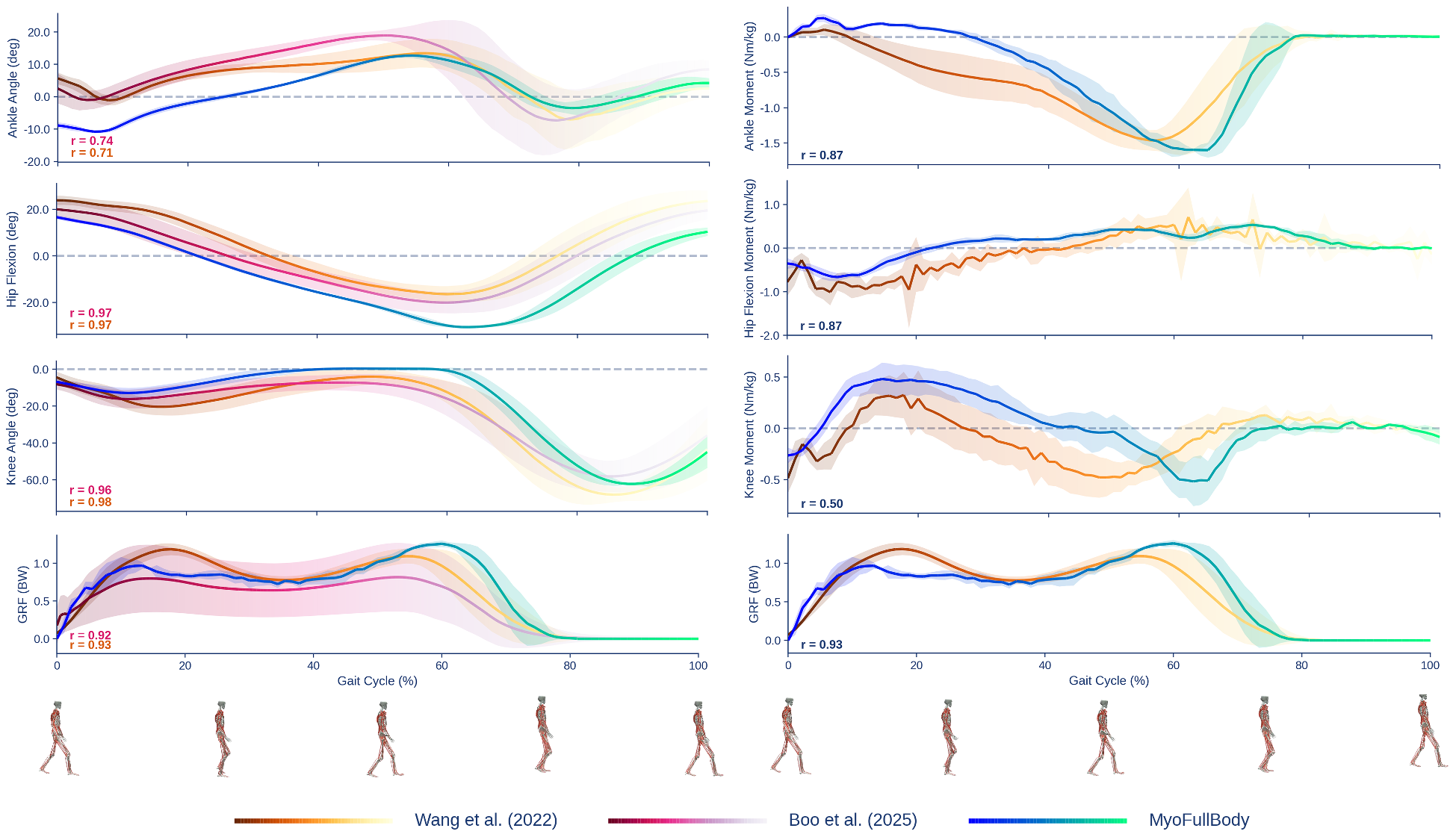 图 3:仿真数据(紫色/橙色曲线)与行走实验数据(阴影部分)在髋、膝、踝关节的角度与力矩匹配度极高。
图 3:仿真数据(紫色/橙色曲线)与行走实验数据(阴影部分)在髋、膝、踝关节的角度与力矩匹配度极高。
更有趣的是,MuscleMimic 展示了极强的 Fine-tuning 能力。针对高动态的“Kick Twist(空中转体踢)”,模型仅需约 10 亿步(单卡数小时)即可掌握这套复杂的全身协调策略。
深度洞察与总结
MuscleMimic 并不满足于仅仅做出“好看”的动画。通过对合成肌肉激活量与临床电信号(EMG)的对比,研究发现:完美的运动学模仿并不等同于完美的生理还原。由于肌肉冗余性,AI 可能会找到一套“偷懒”但能完成动作的激活组合。这提示未来的研究需要引入能耗正则化(Energy Regularization)或更直接的神经约束,才能真正逼近“数字孪生”人体。
Takeaway:对于想要研究神经控制、康复外骨骼或者追求极致物理真实性的 AI 研究者来说,MuscleMimic 提供了一个无需从零构建繁琐仿真环境的高性能起点。