本文提出了 OpenClaw,一个基于解耦“智能体-技能”(Agent-Skill)设计的计算化学自动化框架。该框架通过 OpenClaw 进行集中控制,配合任务规划技能和领域特定技能,在无需对底层 LLM 进行化学微调的情况下,实现了从自然语言指令到复杂多步科研工作流(如甲烷氧化反应动力学模拟)的端到端自动化。
TL;DR
计算化学的自动化一直被束缚在“死板的脚本”与“不可控的 Agent”之间。近日由中科大、普林斯顿等机构联合发表的研究提出了 OpenClaw 框架,通过将通用的推理能力(Agent)与专业的化学软件操作(Skills)解耦,实现了只需一段自然语言,就能驱动从量子化学计算到异构 HPC 提交的全流程任务。
背景定位:这是计算化学领域从“固定工作流”向“自主智能科研辅助”演进的关键一步,它不通过微调模型获得化学知识,而是通过赋予模型“使用专业工具说明书”的能力来解决复杂问题。
痛点深挖:为什么“自动化学”这么难?
在真实的科研场景中,计算化学家每天面临的是极其破碎的流程:
- 环境适配难:在本地调代码,在 Slurm 或 PBS 集群跑计算,环境配置各异。
- 纠错成本高:一个耗时数天的 MD 模拟可能因为一个小参数设置错误而中断,传统脚本通常只能报错退出,无法像人类一样“看一眼日志,改下参数继续跑”。
- 工程紧耦合:现有的 Agent 往往把“如何运行 Gaussian”和“如何思考研究逻辑”混为一谈,导致换个软件就要重写整个 Agent。
核心架构:解耦的思想
OpenClaw 的核心贡献在于其解耦设计。它将系统分为四个独立层级:
- OpenClaw (控制中枢):负责中央控制和监控,维持会话状态。
- Schema 定义的任务规划:将模糊的科学目标(如“研究甲烷氧化过程”)翻译成结构化的任务清单(Task Manifest)。
- Domain Skills (领域技能):每个技能就像一个标准的 API 包,通过
uv隔离环境,确保工具调用的可重复性。 - DPDispatcher (执行落地):它是 Agent 的“手”,负责处理与不同集群调度器的琐碎交互。
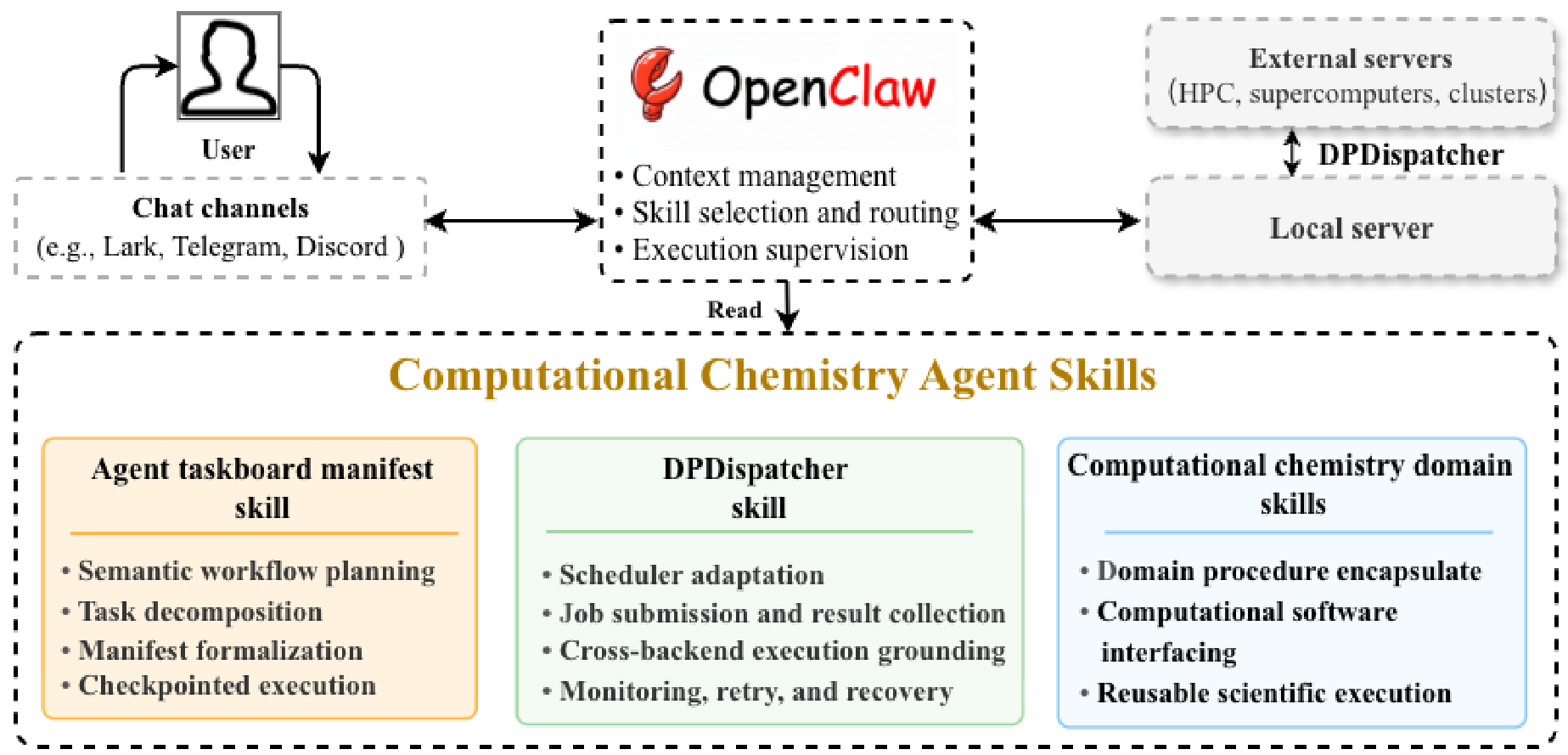 图 1:基于 OpenClaw 的解耦 Agent-Skill 框架架构
图 1:基于 OpenClaw 的解耦 Agent-Skill 框架架构
决策逻辑:Agent 是如何“思考”的?
OpenClaw 采用了一个持续的控制环(Control Loop):
- 感知(Read):阅读当前任务进度和上一步的运行日志(包括标准报错)。
- 规划(Plan):根据内置的“任务看板技能”,动态决定是加载量子化学技能还是提交 HPC 任务。
- 执行(Act):调用具体的 Domain Skill。
- 反馈(Feedback):捕获输出,修正逻辑。
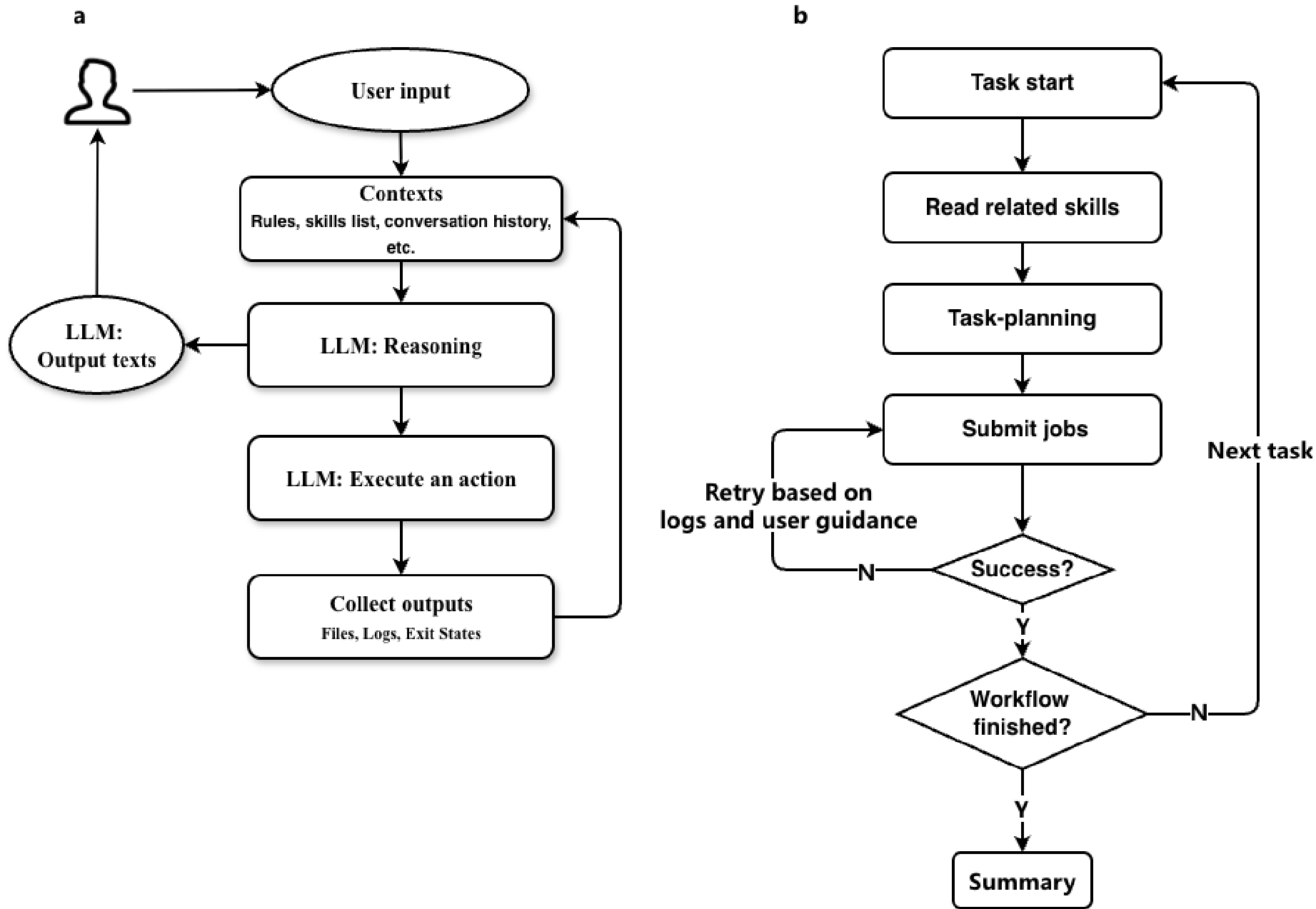 图 2:(a) LLM 决策过程;(b) 自动化任务执行流水线
图 2:(a) LLM 决策过程;(b) 自动化任务执行流水线
案例实战:甲烷氧化反应的 MD 模拟
作者展示了一个极具代表性的甲烷氧化案例。在这个流程中,Agent 自主完成了:
- 使用 Open Babel 构建分子。
- 使用 Gaussian 在 B3LYP 水平下进行几何优化。
- 使用 Packmol 构建 50 CH₄ + 100 O₂ 的复杂反应体系。
- 调用 DeepMD-kit 载入神经网络势函数,并在 LAMMPS 中运行 1ns 的反应动力学模拟。
- 最后调用 ReacNetGenerator 自动分析轨迹代码,提取反应路径。
即使在任务运行中遇到调度器超时或文件格式不兼容,Agent 也能通过读取错误信息,利用内置技能进行“受限修复”(Bounded Recovery),无需人工干预即可完成总线式的任务流。
深度洞察与总结
OpenClaw 的价值在于其模块化生态。作者开源了计算化学 Agent 技能库,这意味着:
- 易扩展:加入对新软件的支持(如 VASP 或 CP2K)只需要编写一个 Skill 描述文件,而不需要改动 Agent 核心。
- 稳健性:通过将任务显式化为“任务看板”,避免了 LLM 在长上下文中的“走神”问题。
局限性:虽然系统具备基本的纠错能力,但对于复杂的物理参数错误(如泛函选择不当导致的物理意义失效),仍需更高阶的科学先验知识注入。
结论:OpenClaw 标志着 AI for Science 正在从“模型替代求解器”转向“智能体接管实验室”。这种解耦架构不仅提升了科研效率,更为未来实现完全自主的“闭环科学发现”铺平了道路。