本文提出了 Glove2Hand,一个将多模态传感手套视频转换为照片级真实感裸手交互视频的框架。该方法结合了 3D Gaussian 手部模型和基于扩散模型的修复器,首次实现了在保持物理接触力(触觉)与空间姿态(IMU)同步的同时,生成高保真的手物交互(HOI)视频。
TL;DR
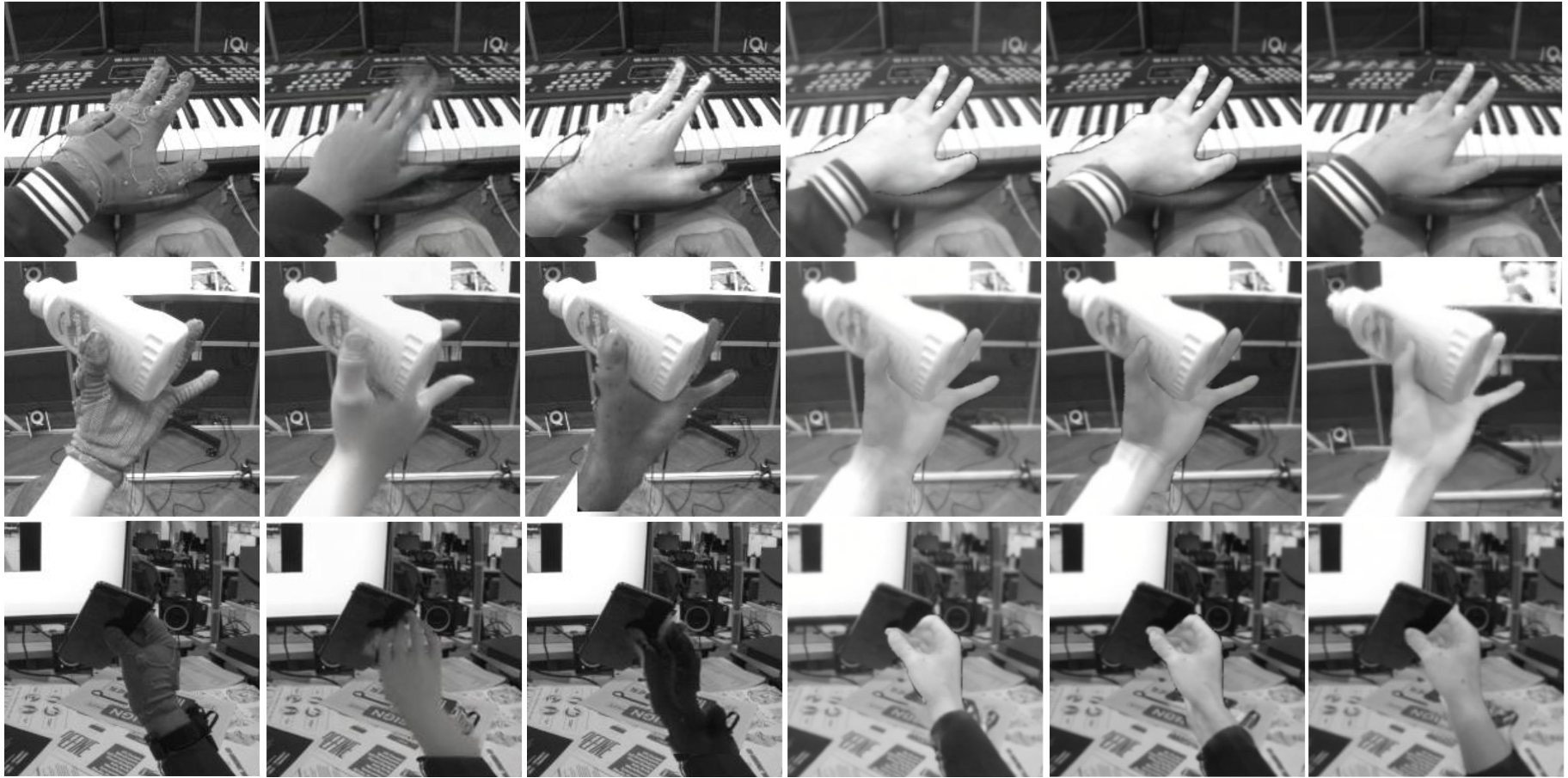
在 AR/VR 和机器人领域,理解手物交互(Hand-Object Interaction, HOI)至关重要,但高质量且带有物理真值(如接触力)的数据极其匮乏。Meta Reality Labs 提出的 Glove2Hand 框架,能够将人们穿戴笨重传感手套拍摄的“工业感”视频,平滑地翻译成照片级真实的裸手交互视频,同时完美保留手套捕捉到的触觉与惯性导航(IMU)信号。
痛点深挖:视觉的“苍白”与手套的“笨重”
当前 HOI 研究面临两大瓶颈:
- 物理感知缺失:纯视觉视频无法提供真实的压力、力反馈等物理 Ground Truth。
- 严重遮挡:在复杂的抓握任务中,摄像头往往看不到手指与物体接触的关键区域。
传感手套虽然能提供精确的接触力和避开视觉遮挡的姿态(通过 IMU),但其笨重的外观、传感器凸起与人类裸手存在巨大的 Domain Gap。直接在手套数据上训练的视觉模型,无法直接泛化到裸手识别任务中。
Methodology:3D 重建与生成模型的双剑合璧
Glove2Hand 的核心挑战在于确保 时间一致性 (Temporal Consistency) 和 非刚性变形 (Non-rigid Deformation) 的自然度。作者通过三步走战略实现了这一目标:
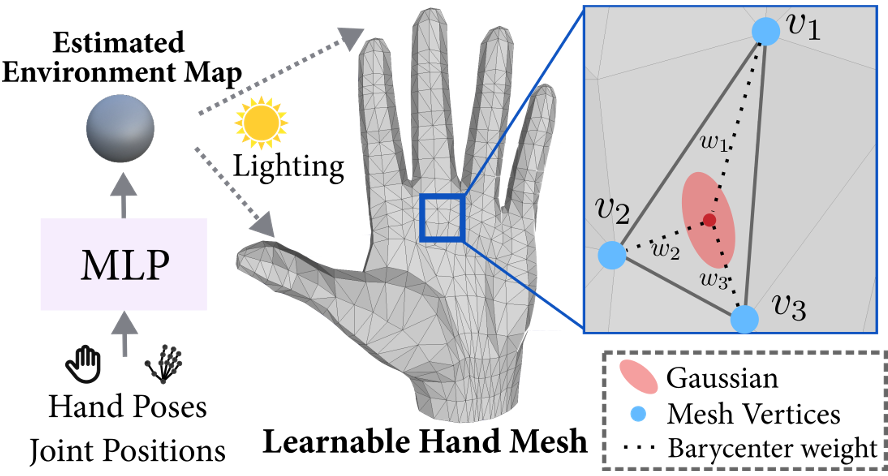
1. 表面锚定的 3D Gaussian 手部 (Surface-Grounded Gaussian Hand)
相较于传统的 2DGS,本项目提出将 3D Gaussians 直接定义在参数化手部网格表面。
- 几何先验 (Geometric Prior):利用网格的重心坐标锁定高斯球瓣,在手部剧烈运动时依然能维持表面完整度。
- 可重光照 (Relightable):借助网格法线信息和动态球谐函数 (SH Coefficients),自动预测环境光效和自阴影。
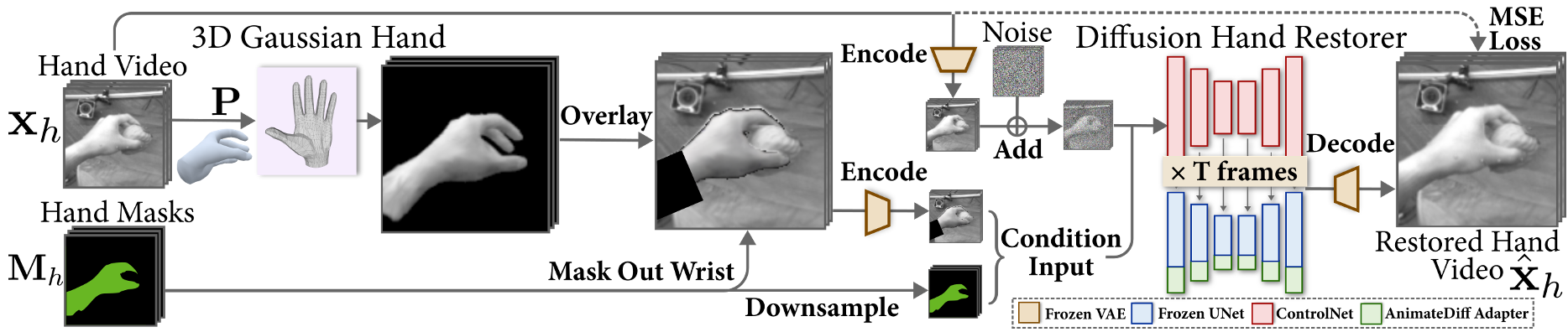
2. 手部扩散修复器 (Diffusion Hand Restorer)
仅仅渲染出手部是不够的,因为它无法处理与未知物体的细微接触细节。作者结合了 ControlNet 和 AnimateDiff:
- 图像掩膜修复:自动识别手套区域,利用光流法 (Propainter) 进行背景补全。
- 扩散引导:将初步渲染的手部通过扩散模型进行纹理细化、腕部平滑连接。
实验与结果:不仅是视觉,更是物理
作者推出了全球首个多模态 HOI 数据集 HandSense,包含同步的裸手视频、手套视频、触觉压力和 IMU 信号。
性能飞跃
- 生成质量:在对比实验中,Glove2Hand 的 FID 得分为 30.1,远优于基于简单映射的 Pix2Pix(38.6)或专注于手部修复的 HandRefiner(35.5)。
- 遮挡下的姿态追踪:在使用合成数据增强后,UmeTrack 的平均关节点误差从 19.2 mm 降至 16.6 mm。这证明了合成视频中保留的“手套式”真实姿态信息对视觉模型有极大的教育意义。
深度洞察与总结
总结 (Takeaway):Glove2Hand 证明了,我们并不一定要采集大规模的裸手视频来训练物理感知模型,反其道而行之:通过“翻译”带有高精度传感器手套捕获的原始视频,依然能获得极高质量的生成样本。
局限性 (Limitations):虽然模型能够生成真实的手部,但面临“完全未见过”的环境(Wild settings)时,生成质量仍有下滑(MOS 从 4.04 降至 2.68)。未来的改进方向应集中在扩大基础模型对复杂背景的建模能力,以及增强手物接触面的物理仿真。
展望:这一方法有望加速人形机器人操作(Manipulation)和 VR 真实交互场景的落地,让视觉传感器也能“看见”力。