本文提出了 ProbeFlow,一种针对具身智能 VLA 模型的无需训练的自适应 Flow Matching 推理框架。通过引入“前瞻线性探针”机制,该方法在 MetaWorld 等基准上将动作解码速度提升了 14.8 倍,在保持 SOTA 成功率的同时大幅降低了机器人控制延迟。
TL;DR
在机器人视觉-语言-动作(VLA)领域,Flow Matching (FM) 已成为生成高精度动作的主流选择。然而,FM 依赖的多步 ODE 求解带来了极高的推理延迟。本文提出的 ProbeFlow 是一种**无需训练(Training-Free)**的自适应推理框架。它通过一个巧妙的“几何探针”实时检测动作轨迹的弯曲程度:路笔直时快跑(减少步数),路弯曲时慢行(增加步数)。实验证明,它在保持成功率的前提下,将动作解码提速了 14.8 倍,端到端延迟降低 2.8 倍。
痛点深挖:被忽视的“动作头”瓶颈
当前的 VLA 模型(如 OpenVLA, RT-2)在复杂任务中表现惊人,但其实时性一直大打折扣。
- 架构不对称性:视觉骨干网络只需一次前向传播,但动作头(Action Head)通常基于扩散或流匹配模型,需要迭代 N 次(通常 N=20~50)来生成一个动作点。
- 计算浪费:现有的加速方案多针对视觉部分,而忽略了动作头占用了超过 70% 的推理时间。传统的固定步数求解器(Fixed-Step Euler)在简单的直线运动中依然采用高频采样,造成了极大的计算资源浪费。
方法论:前瞻线性探针 (Lookahead Linearity Probe)
作者的核心洞察是:Flow Matching 的生成路径并非处处复杂。在机器人抓取过程中,大段的“平移接近”动作轨迹几乎是直线,只有在“触觉交互”或“精准抓取”阶段轨迹才会剧烈弯曲。
1. 几何直觉与数学实现
ProbeFlow 引入了一个轻量级探测机制:
- 探测(Probing):在 t=0 时刻,利用当前模型预测一个大的前瞻步(如 ),到达 。
- 比对(Comparison):计算起点速度 与探测点速度 之间的余弦相似度 。
- 决策(Adaptive Scheduling):
- 如果 (夹角极小):说明这段路是直的,直接一步到位,跳过中间所有计算。
- 如果 :说明轨迹正在转弯,立即触发高密度采样以保证精度。
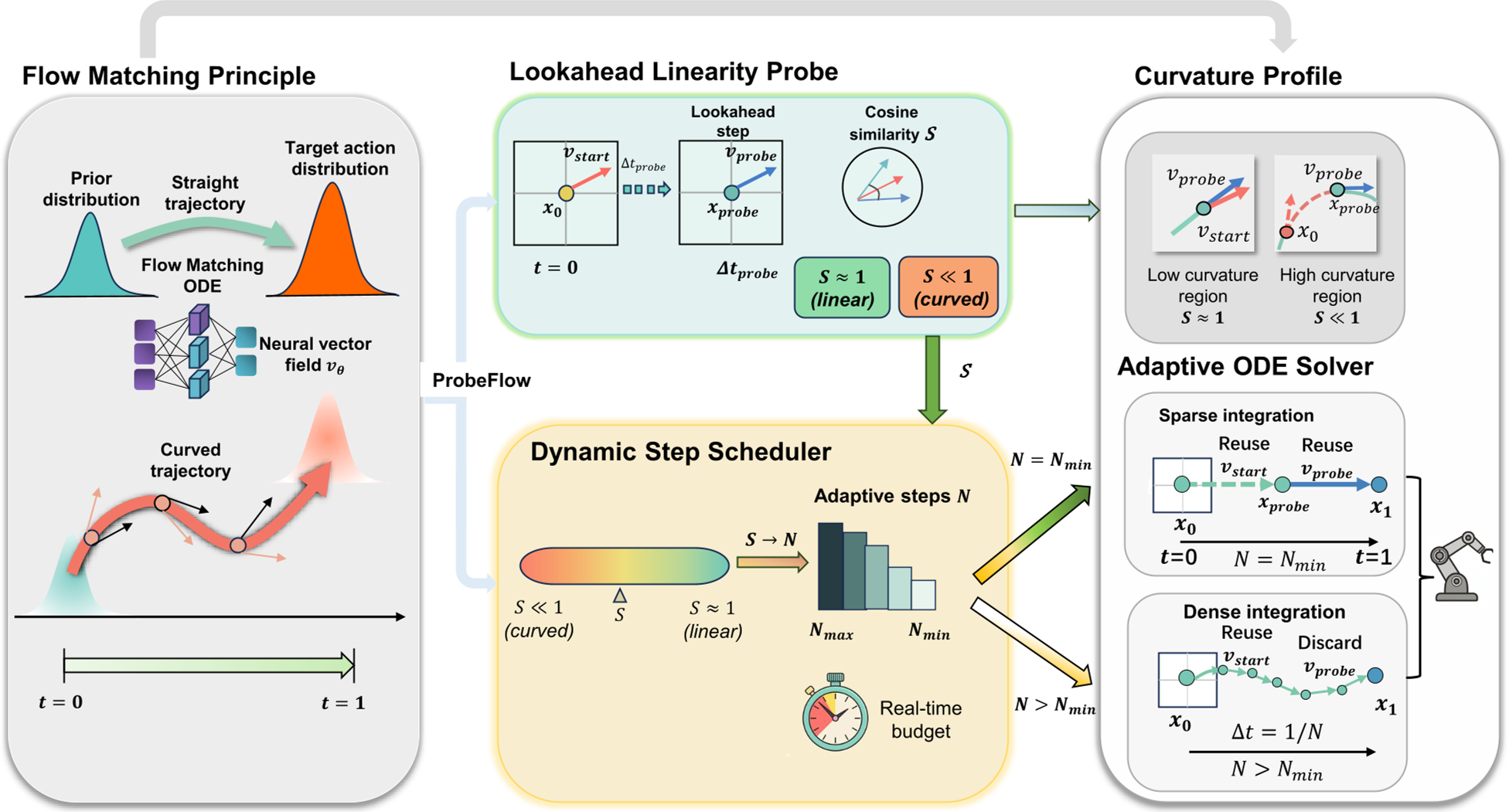 图 1:ProbeFlow 框架概览,展示了从几何探测到动态步数分配的全过程。
图 1:ProbeFlow 框架概览,展示了从几何探测到动态步数分配的全过程。
2. 无需额外训练的优势
不同于其他需要训练辅助网络(如 AdaFlow)的方法,ProbeFlow 纯粹基于几何测量。这意味着它可以直接应用于任何预训练号的 FM 模型上,无需微调。
实验与结果:速度与精度的双重胜利
SOTA 性能对比
在 MetaWorld 50 项任务和 LIBERO 长程任务上,ProbeFlow 展示了统治级的性能:
- MetaWorld:平均步数从 50 步降至 2.6 步,成功率 83.2%(甚至优于 50 步基线),充分说明冗余的步数在某些情况下反而会积累误差。
- LIBERO:面对语义复杂的长程任务,ProbeFlow 能够自动在语义转折点(如从“移动”切换到“开门”)增加计算资源,成功率不仅远超同等算力的 N=3 基线,更直逼高算力基线。
 表 1:在 MetaWorld 上的延迟分析,展示了 ProbeFlow 在 Flow Solver 耗时上的惊人压缩。
表 1:在 MetaWorld 上的延迟分析,展示了 ProbeFlow 在 Flow Solver 耗时上的惊人压缩。
可视化分析
通过对抓取任务的动态步数可视化发现,当机械臂在空中快速移动时,步数为 2;当接近物体并开始精细调整手爪角度时,步数自动增加到 10 以上。这种“按需分配”的智慧是其高效的秘诀。
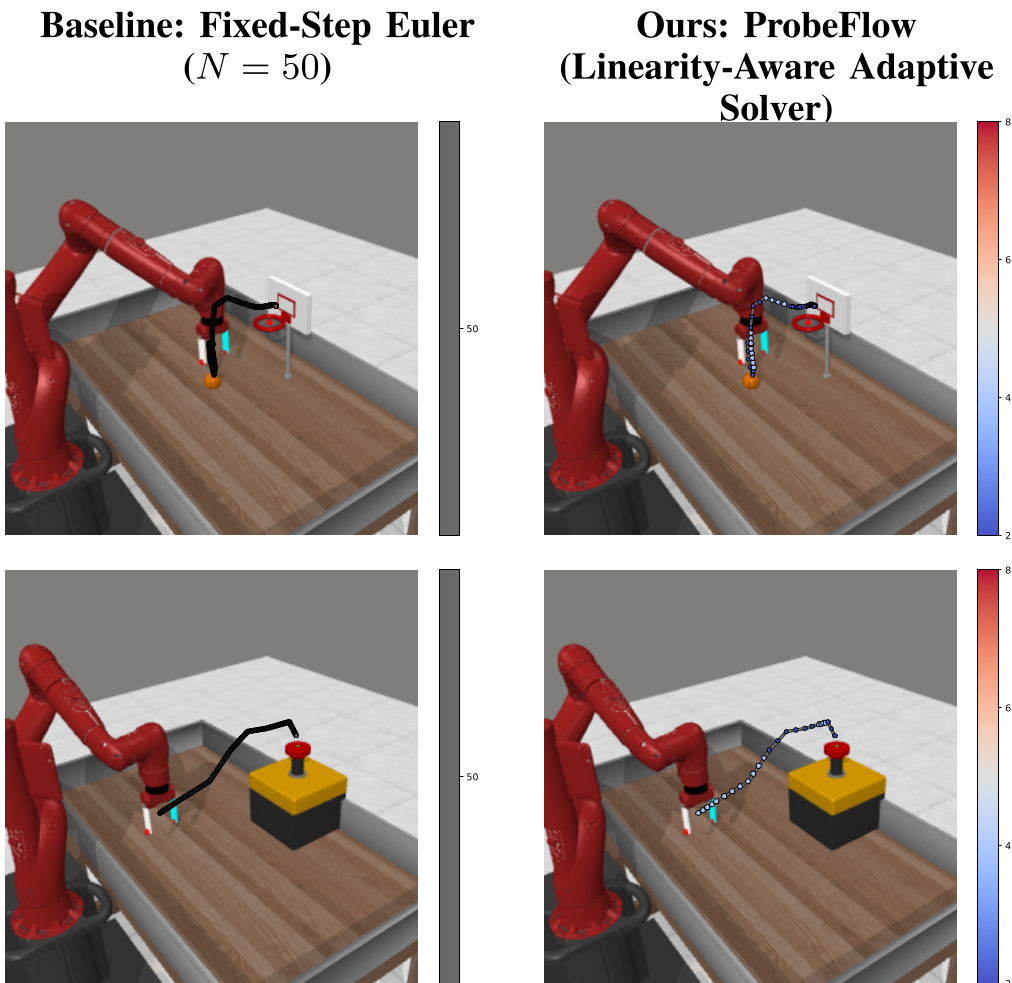 图 2:机械臂不同操作阶段的自适应采样密度可视化。
图 2:机械臂不同操作阶段的自适应采样密度可视化。
深度洞察与总结
总结 (Takeaway)
ProbeFlow 的成功揭示了一个深刻的道理:在具身智能中,计算效率不应是均摊的,而应是场景感知的。通过简单的线性代数工具(余弦相似度),就能在不需要重训练的情况下解决生成式模型的推理顽疾。
局限性与未来展望
- 阈值敏感性:目前的敏感度参数 在不同领域(Domain)之间仍需手动微调。
- 极端动态环境:在物理接触极其频繁、动力学极度非线性的任务中,当前的单次探测可能不足以应对。
- 未来方向:如何将这种几何探测器从动作空间扩展到联合视觉特征空间,实现全流程的自适应推理,将是下一个令人兴奋的研究点。
本文为学术前沿解读,旨在剖析 VLA 模型在实时机器人控制中的最新突破。