SOFTMIMICGEN is an automated synthetic data generation pipeline designed for deformable object manipulation. By leveraging non-rigid registration and a small set of human demonstrations (1-10), it scales datasets to thousands of high-fidelity trajectories, enabling SOTA performance in complex tasks like cloth folding, rope manipulation, and surgical threading.
Executive Summary
TL;DR: SOFTMIMICGEN is a breakthrough pipeline that automates the generation of massive robot datasets for deformable objects (e.g., cloth, rope, tissue). By starting with just a handful of human demonstrations and applying a novel non-rigid registration mechanism, it synthesizes thousands of diverse, successful trajectories. This removes the "data bottleneck" for soft-body manipulation, enabling robots to learn complex skills like folding towels or suturing tissue with minimal human effort.
Academic Context: This work is a direct evolution of the MIMICGEN lineage. While previous iterations focused on rigid-body invariance (assuming objects have a fixed "center"), SOFTMIMICGEN breaks this mold by treating objects as dynamic point clouds, positioning itself as a core infrastructure for future robot foundation models.
The "Rigidity" Trap in Robot Learning
Current SOTA methods for data generation, such as the original MIMICGEN, rely on a simple but powerful assumption: Invariance. If a robot knows how to pick up a mug at point A, we can mathematically "shift" that motion to pick up a mug at point B by calculating the rigid transform between the two poses.
The Problem: Deformable objects (ropes, sponges, fabrics) have no "fixed pose." When you move one end of a rope, its entire geometry changes non-linearly. Rigid SE(3) transforms cannot capture this. Consequently, existing automated systems fail miserably when the object's initial state deviates even slightly from the demonstration.
Methodology: From Rigid Transforms to Warp Fields
The core innovation of SOFTMIMICGEN is the shift from Rigid SE(3) Frames to Non-Rigid Registration.
1. Representation as Nodes
The system treats every deformable object as a collection of nodes $O = {n_i}_{i=1}^{N_O}$. This "point cloud" representation allows the system to track local deformations that a single coordinate frame would miss.
2. The Warp Field (Non-Rigid Registration)
When a new scene is generated, the system compares the current object state to the state in the human demonstration. It solves an optimization problem to find a smooth function $f: \mathbb{R}^3 \rightarrow \mathbb{R}^3$ that maps points from the source to the target.
3. Trajectory Adaptation
The robot's end-effector path is not just shifted; it is warped.
- Position: $p_t \rightarrow f(p_t)$
- Rotation: $R_t \rightarrow ext{orth}(J_f(p_t)R_t)$ Using the Jacobian ($J_f$) of the warp field allows the robot's gripper orientation to adapt to the local curvature of the deformed object.
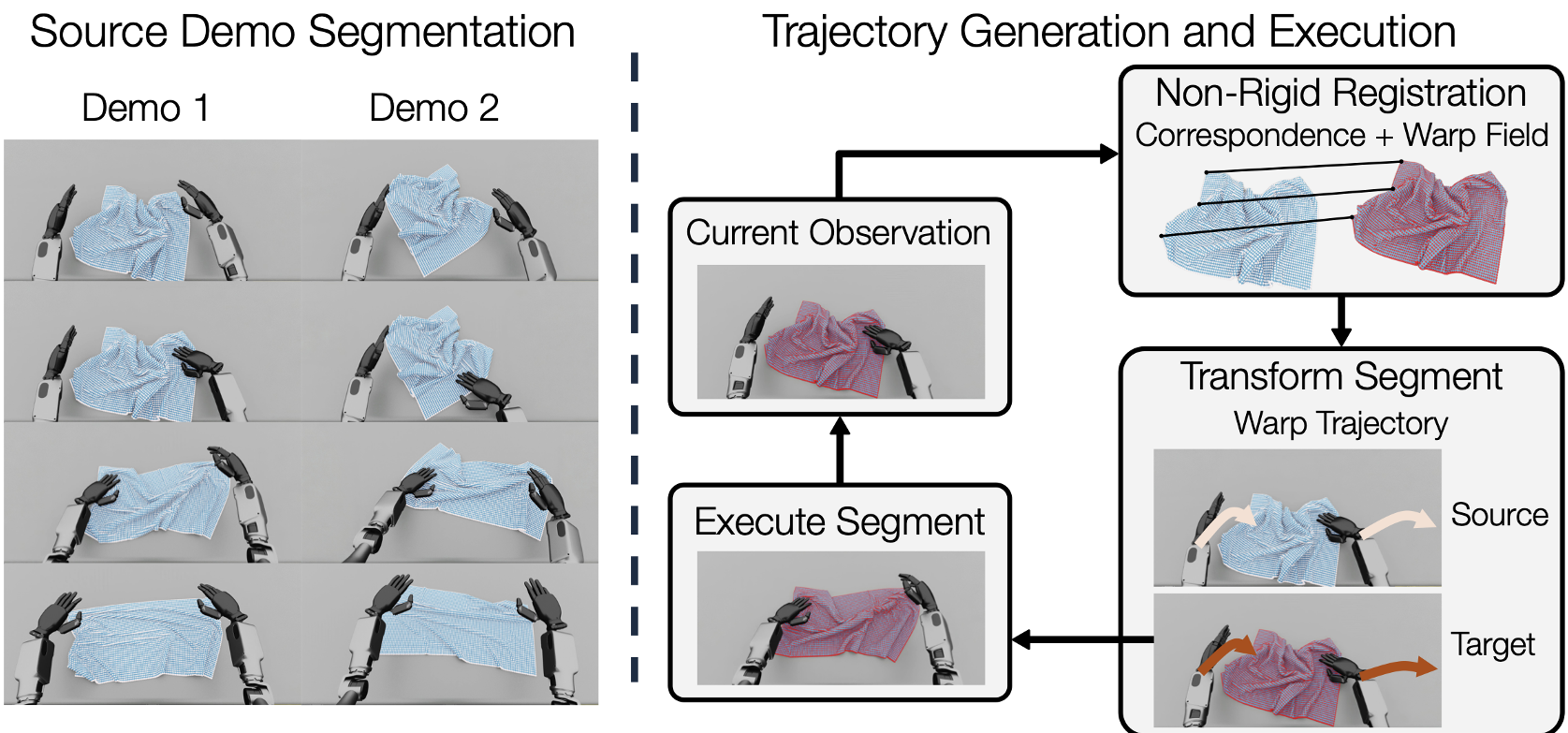 Fig 2: The system selects the best source segment based on registration cost and applies the warp field to generate New trajectories.
Fig 2: The system selects the best source segment based on registration cost and applies the warp field to generate New trajectories.
Experiments: Scaling to the "Unsimulatable"
The authors introduced a suite of 10 challenging tasks across 4 different robot embodiments, including a Humanoid (GR1) and a Surgical Robot (dVRK).
Key Metrics:
- Scaling Power: For the "Franka - Rope" task, human-only data yielded a 2% success rate, while SOFTMIMICGEN-boosted data achieved 100%.
- Generalization: Unlike MIMICGEN, which only succeeded in 8% of rope trials, SOFTMIMICGEN achieved a 98% success rate by successfully adapting to varied initial rope segments.
- Architecture Agnostic: The generated data proved effective for both Diffusion Policies and BC-RNN-GMM architectures.
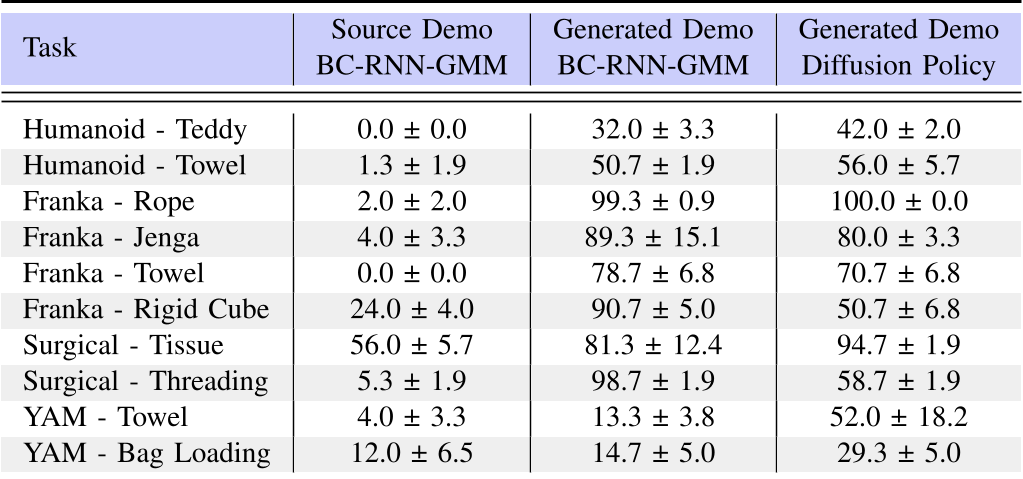 Table 1: Drastic performance gains (often >50%) when using generated data versus limited human source demos.
Table 1: Drastic performance gains (often >50%) when using generated data versus limited human source demos.
Sim-to-Real: Bridging the Gap
A critical validation was the deployment on real hardware. Using a "Point Bridge" (a VLM-guided point cloud extractor), the team showed that policies trained purely in sim could achieve Zero-Shot Transfer to a real Franka arm folding a real towel. Furthermore, "Sim-Real Co-training" (mixing 1,000 sim demos with 30 real ones) pushed the success rate of bag loading from 33% to 93.3%.
 Fig 4: Real-world validation on towel folding, rope manipulation, and bag loading.
Fig 4: Real-world validation on towel folding, rope manipulation, and bag loading.
Critical Insight & Conclusion
SOFTMIMICGEN proves that the bottleneck in robot learning isn't necessarily the algorithms (like Diffusion Policy), but the data richness. By using non-rigid math to "hallucinate" valid human-like interactions in simulation, we can train robots on corner cases that would take years to collect manually.
Limitations: Currently, the system assumes a fixed sequence of subtasks. Future iterations will likely need to handle "unstructured" deformation recovery—where the robot must decide to retry a fold if the fabric slips.
Final Takeaway: This is a mandatory read for anyone building "Foundation Models" for robotics. Deformable object manipulation is no longer a niche physics problem; it is now a scalable data-generation problem.