本文提出了 UMPE(Unified Map Prior Encoder),一个能够整合多种异构地图先验(HD/SD 矢量地图、栅格化 SD 图、卫星图像)的统一编码器。该方法通过对齐感知架构提升了在线矢量建图(In nuScenes, MapTRv2 mAP +5.9)与端到端规划(L2 误差降低 0.3m)的性能。
TL;DR
在自动驾驶领域,如何利用已有的地图资源(从高精地图到普通的卫星图)来辅助实时感知一直是个难题。本文提出的 UMPE (Unified Map Prior Encoder) 是一套能够吃下“全家桶”级别地图先验的框架。它不仅能显著提升在线 HD Map 的建图精度(mAP 提升高达 5.9),还能让端到端规划更安全(碰撞率减半)。最令人惊叹的是它的鲁棒性:即使你在训练时喂了四种先验,测试时只给它一种,它的表现依然能吊打专门针对单先验训练的模型。
背景定位:从传感器中心到先验融合
目前的在线建图(Mapping)和端到端规划(Planning)大多是“传感器中心”的。虽然学术界已经有一些尝试引入 SD Map 或卫星图,但这些方案通常是“专人专治”,即针对特定组合设计模型。一旦遇到测试时某种地图不可用,模型性能往往会雪崩。UMPE 的出现,旨在提供一个幂集(Powerset)级别的通用解决方案。
痛点与动机:异构与对齐的挑战
作者发现,限制地图先验利用的核心障碍有三点:
- 异构性:矢量数据(Polylines)和栅格数据(Pixels)的数学表达完全不同。
- 位姿漂移(Pose Drift):地图资料与当前车端的 GPS/惯导定位往往存在几米甚至更大的偏差,直接融合会导致特征“打架”。
- 可用性波动:在城市中心有 HD Map,在郊区可能只有信号差的 SD Map,模型必须具备动态调整的能力。
方法论详解:几何优先,表观随后
UMPE 的核心架构设计蕴含了一个深刻的直觉:先确定几何骨架,再补充纹理细节。
1. 矢量编码器:解决“位姿”与“重要性”
对于矢量地图(HD/SD Vector),UMPE 做了三件事:
- SE(2) 预对齐:在特征提取前,先预测一个微小的平移旋转量(),将地图线段校准到当前 BEV 坐标系下。
- Confidence-Biased Cross-Attention:模型通过注意力机制拉取矢量信息,但引入了“置信度偏置”。如果先验地图某段线存疑,Log-confidence 会在 Softmax 阶段将其“静音”。
- 多频率正弦特征:避免使用简单的 MLP,通过多频率编码(Sine-PE)保留精细的几何细节。
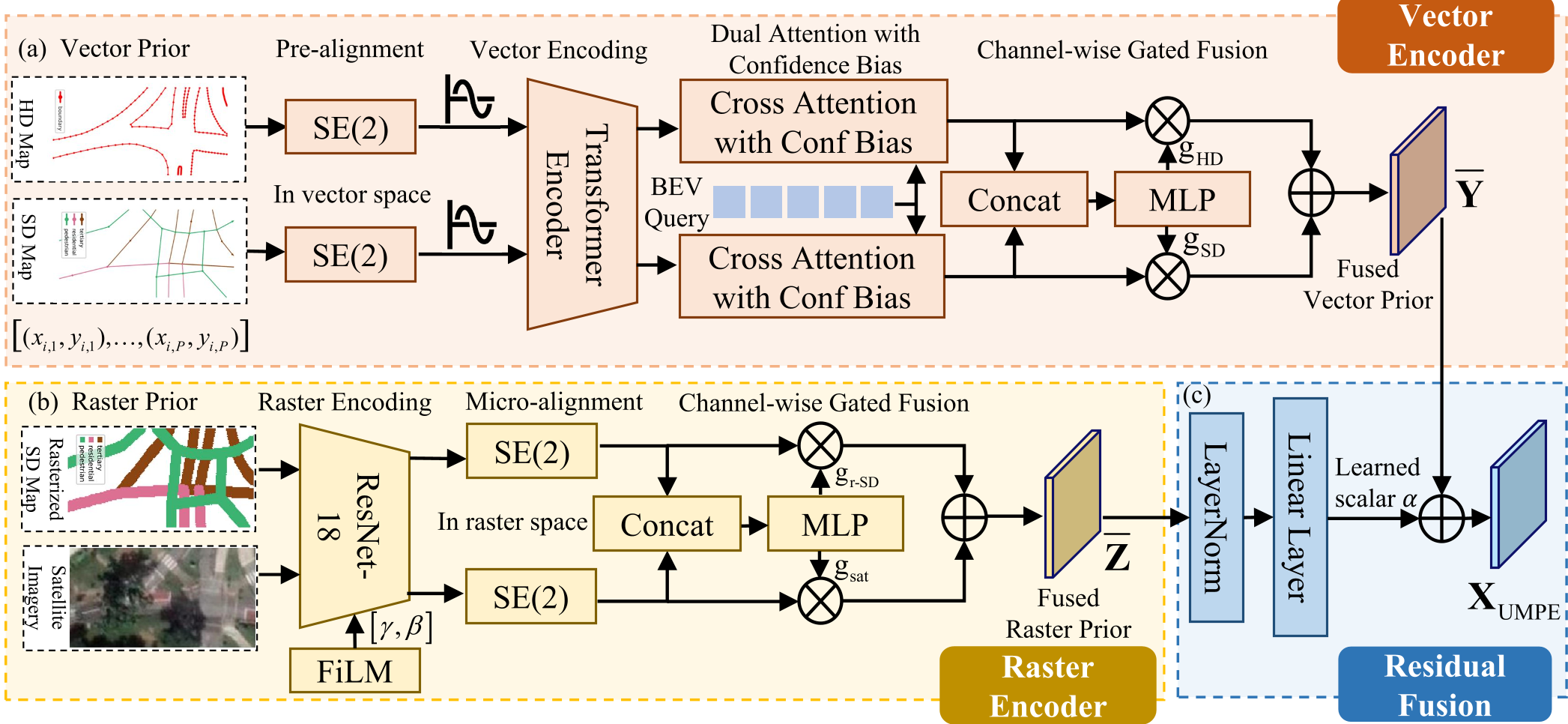 图 1: UMPE 的双支路架构,左侧为矢量编码器,右侧为栅格编码器。
图 1: UMPE 的双支路架构,左侧为矢量编码器,右侧为栅格编码器。
2. 栅格编码器:残差注入与无害原则
对于卫星图和栅格化 SD 图,UMPE 采用共享 ResNet-18 骨干网,并使用 FiLM (Feature-wise Linear Modulation) 进行环境注入。为了防止地图先验在出错时误导感知,作者设计了零初始化残差融合:模型在训练初期权重为 0,只有当先验信息确实能降低 Loss 时,网络才会学会从先验中提取证据。
实验与结果:全方位碾压
在 nuScenes 榜单上,UMPE 展示了强悍的适配性。无论是作为插件接入 MapTRv2 还是更强的 MapQR,其 mAP 提升均在 5pt 以上。
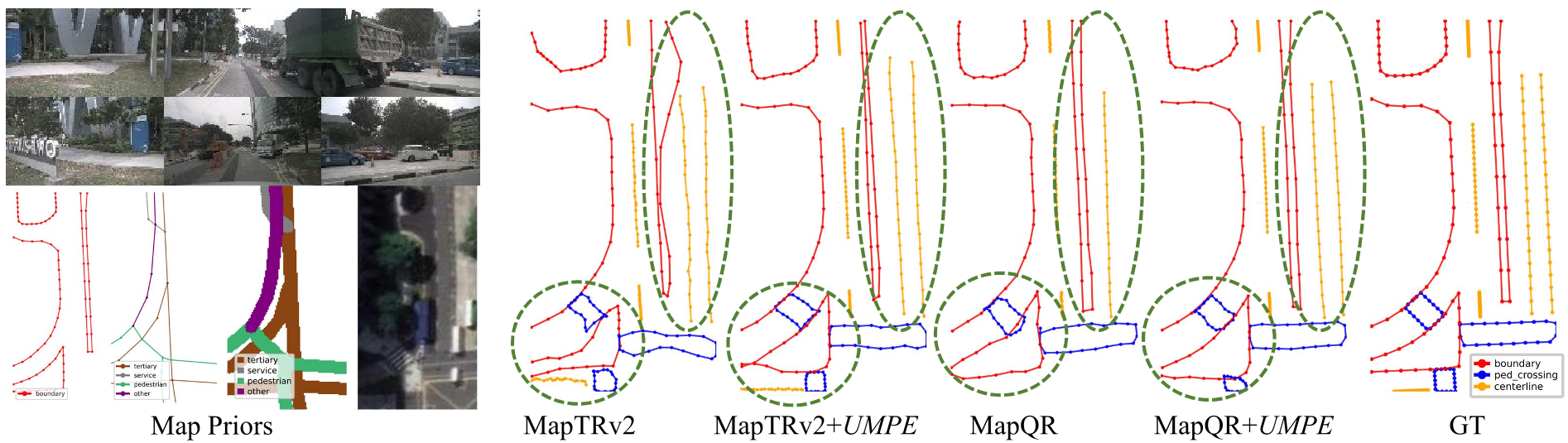 图 2: 可视化对比。可以看到加入 UMPE 后(右列),原本断裂的人行横道、弯曲的路缘石都得到了极大的几何纠正。
图 2: 可视化对比。可以看到加入 UMPE 后(右列),原本断裂的人行横道、弯曲的路缘石都得到了极大的几何纠正。
关键战绩:
- 在线建图:MapTRv2 mAP 提升 5.9 (61.5 → 67.4)。
- 端到端规划:在 VAD 框架下,轨迹 L2 误差从 0.72m 降至 0.42m,碰撞率从 0.22% 骤降至 0.12%。
- 鲁棒性测试:使用 SourceDropout 训练后,模型不仅适应多种缺失组合,且即便只输入单一先验,其效果也优于专门定制的模型。
深度洞察:为什么有效?
UMPE 的成功很大程度上归功于其融合顺序(Fusion Order)。实验得出,Vector → Raster 的顺序显著优于反向操作。这是因为矢量信息提供了清晰的全局几何结构(骨架),而栅格信息则在此基础上提供了局部的纹理修正。这种顺序符合人类驾驶员的直觉:先看导航地图的大致车道结构,再根据地面标线补充细节。
总结与展望
UMPE 证明了地图先验不是感知的敌手,而是强有力的盟友。通过科学的对齐和置信度管理,异构地图资源可以被转化为强大的特征支撑。
局限性: 虽然在开放数据集上表现优异,但在地图极其陈旧(例如道路施工导致完全拓扑变化)的情况下的处理逻辑,仍有待更深入的闭环验证。未来该方向或许会向“动态感知地图更新”进一步演进。