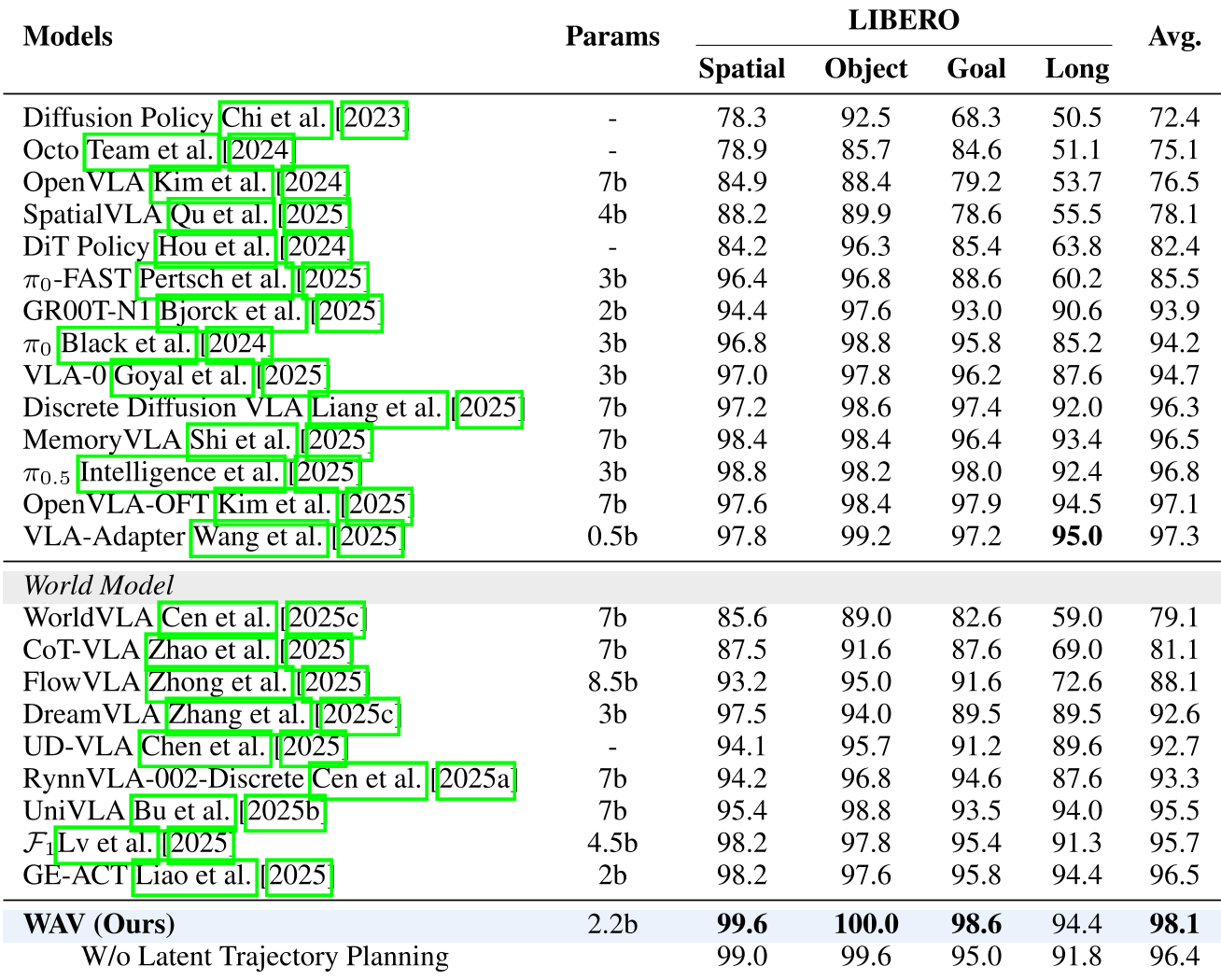
本文提出了 World–Value–Action (WAV) 模型,这是一种统一的多模态具身智能框架,通过在潜在空间(Latent Space)进行隐式规划,将视觉预测、价值评估与动作生成相耦合。WAV 在 LIBERO 仿真基准测试中达到了 98.1% 的平均成功率,并在复杂长程真实机器人任务中显著超越了现有 SOTA。
TL;DR
西湖大学研究团队推出的 World–Value–Action (WAV) 模型,通过将 VLA 系统设计为一个具备“预测-评估-执行”闭环的整体,解决了机器人处理长程任务时的“近视”问题。它不再只是盲目地根据当前画面输出动作,而是先在脑海中模拟出多种可能的未来(视频生成),挑选出得分最高的发展趋势(价值评估),最后才转化为精确的控制指令。
背景定位
目前的大多数 VLA 模型(如 OpenVLA, π0)本质上是复杂的“条件映射器”。虽然语义概括能力强,但在物理世界的逻辑链条面前,它们往往表现得像是一个没有耐心的棋手——只看眼前这一步,不看后面十步。WAV 则是试图在 VLA 的骨架上植入“世界模型(World Model)”的大脑,使规划成为一种隐式推理过程。
痛点深挖:为何长程规划这么难?
作者在论文中提出了一个非常有力的数学观察:动作空间的“可行性诅咒”。 在处理长程任务时,动作序列的空间是巨大的,但能够达成目标的“可行路径”在整个空间中占比极低。随着规划长度(Horizon)的增加,找到正确路径的概率会呈指数级衰减。这就是为什么直接在动作空间(Action Space)里做搜索(如传统的采样控制)效率极低的原因。
方法论详解:WAV 的三位一体架构
WAV 将控制流程拆解为三个紧密耦合的模块,所有模块均基于 Flow Matching(流匹配) 训练:
- 视频生成模块(World):基于 Diffusion Transformer (DiT),输入指令和当前图像,预测未来的视觉特征流。它负责告诉机器人:“如果你这么做,世界大概会变成这样。”
- 轨迹价值模块(Value):评估上述生成的视觉轨迹。它预测该轨迹的累计回报(Return),作为规划的指南针。
- 动作解码模块(Action):最后由动作头将视觉特征和价值目标转化为真实的机器人关节指令。
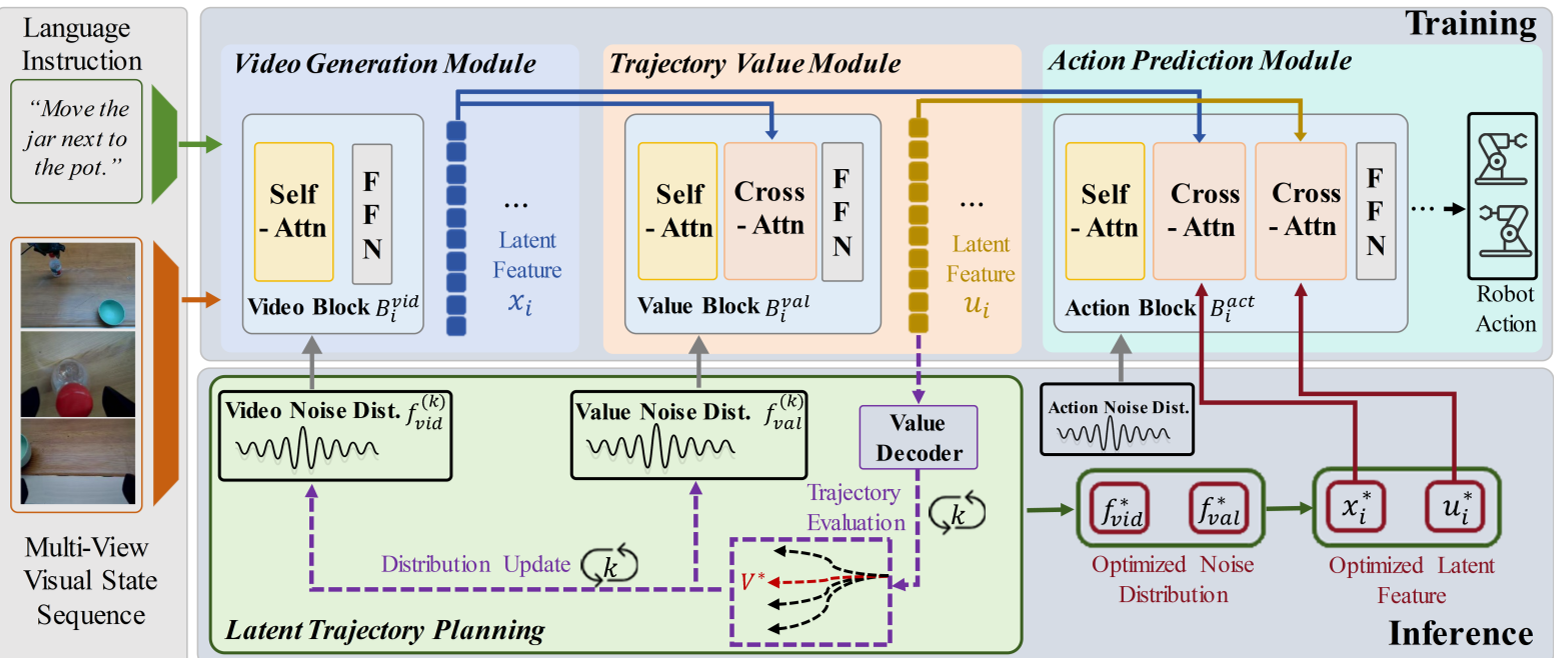
潜在空间迭代规划 (Latent Planning)
WAV 的核心秘诀在于迭代推理(Algorithm 1)。在推理阶段,模型并不仅仅生成一次预测。它会采样多组潜在噪声,通过迭代优化,让这些噪声逐渐向“高价值”和“物理真实”的分布靠拢。这种方式避开了在动作空间搜索的低效,转而对潜在变量进行重加权。
实验与结果
在仿真测试 LIBERO 中,WAV 在最难的 LIBERO-Long(长程复合任务) 表现尤为惊人。当移除“潜在规划”环节后,性能显著下降,这证明了“脑内模拟”对解决复杂任务的决定性作用。
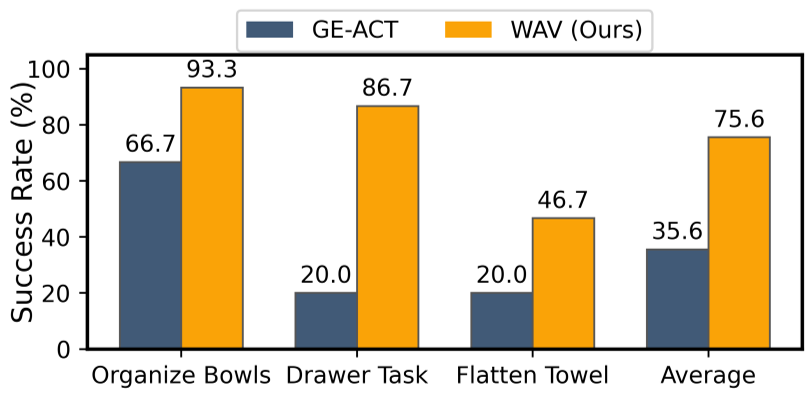
在真实世界任务中(如“打开抽屉并放入物体”),WAV 展现出了极强的鲁棒性。传统的 VLA 模型往往在抓取不精准后产生连锁反应导致失败,而 WAV 由于能预判后果,能够及时修正轨迹,避开了误差累积。
深度洞察
WAV 的成功给了我们一个启示:End-to-End 不代表单次前向传播。 真正的智能体应当具备“预演算”的能力。通过引入价值函数(Value Function)来引导生成模型,WAV 实际上是在执行一种类似 AlphaGo 在博弈空间搜索的逻辑,只不过它处理的是连续的视觉和物理控制空间。
局限性: 由于引入了多次迭代采样,其推理延迟和内存消耗(GPU Reserved Memory)相比传统 VLA 有所增加。这在对实时性要求极高的场景下可能需要进一步的量化或剪枝优化。
总结
WAV 模型成功地将 VLA 从单纯的“反应式控制”推向了“预测式规划”。它证明了通过潜在空间的概率重加权,可以极大地缓解长程操作中的失效问题。对于未来的具身智能系统,这种“思考后再行动”的范式很可能成为标配。